
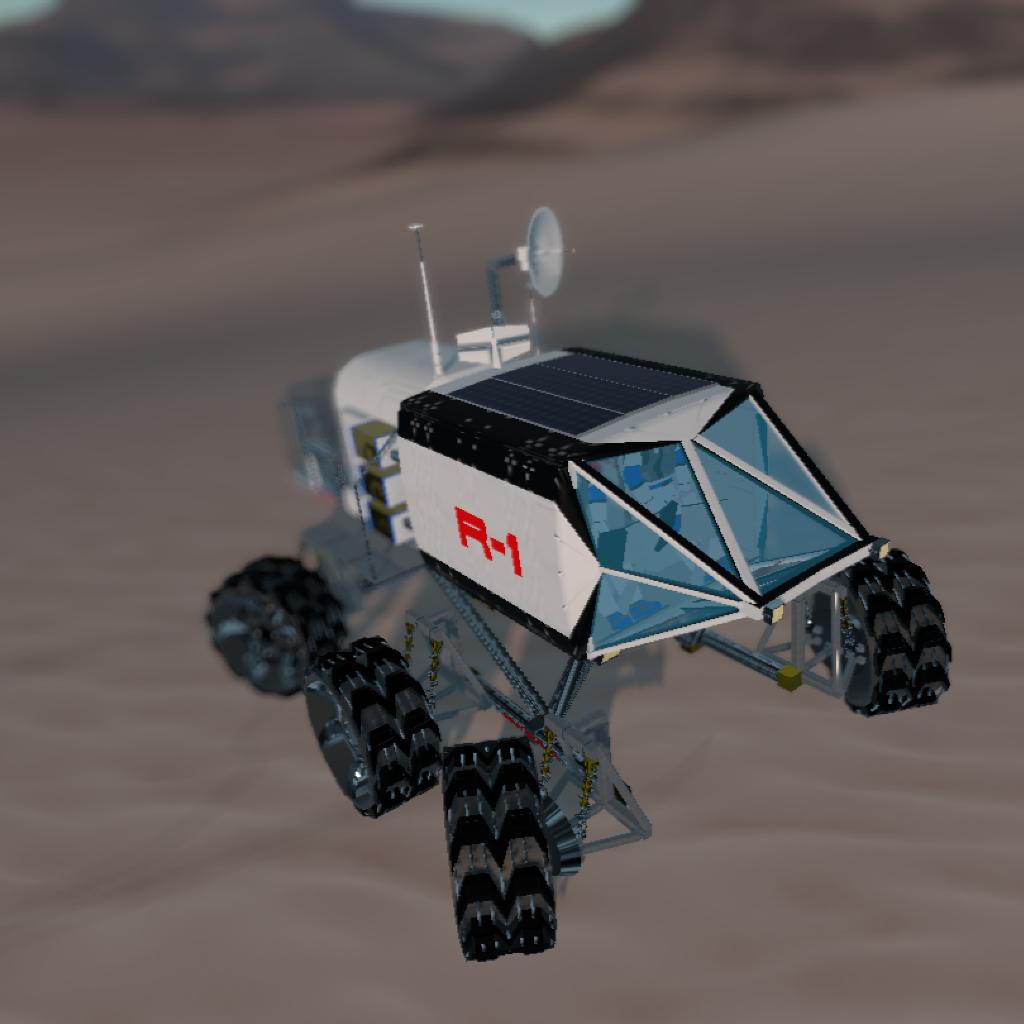
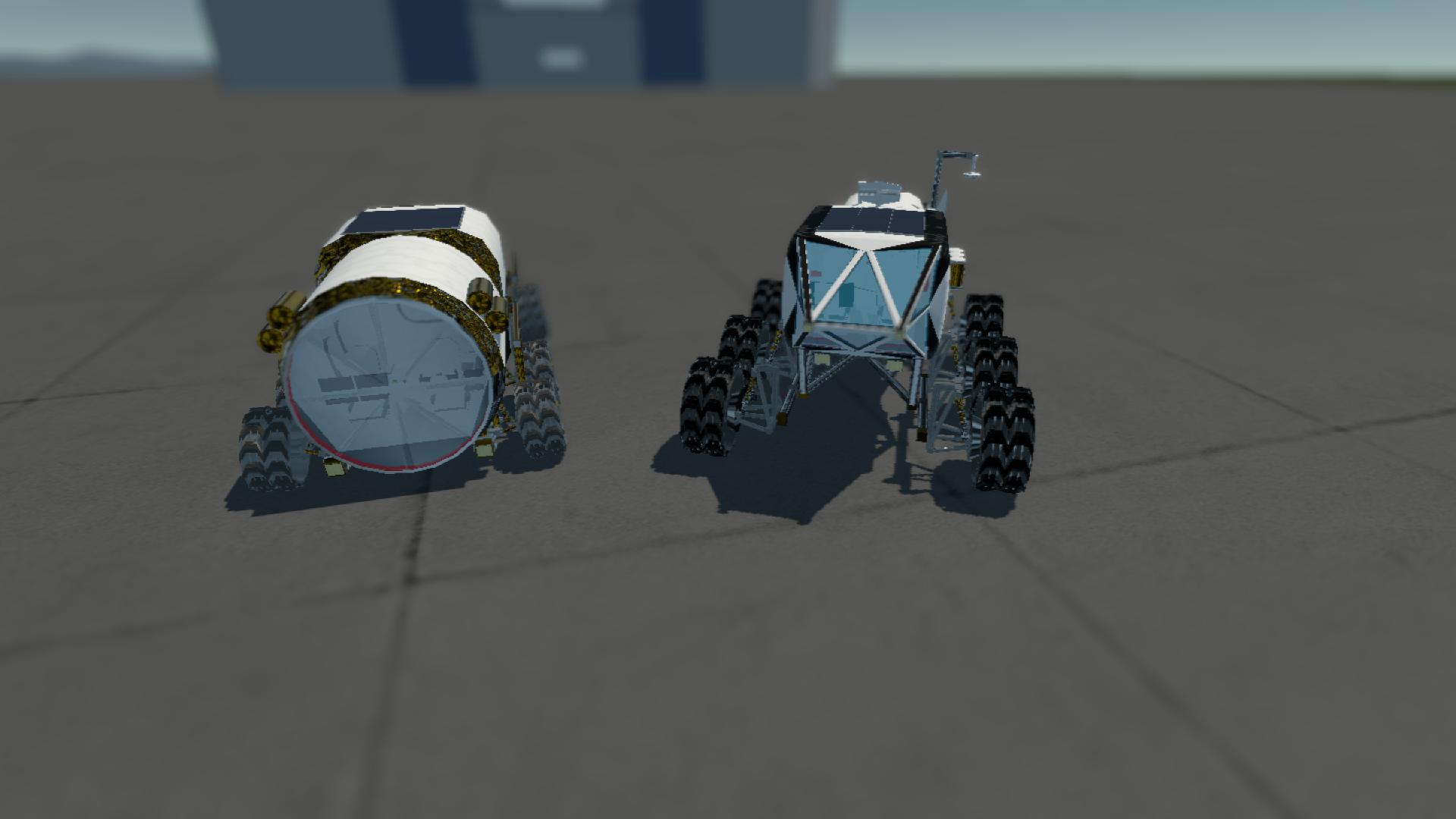
An interesting performance Rover
Being the direct successor of the obsolete but robust ALBRV Mk2, much more refined and updated.
Similar in size to the old LRV, this new Rover is designed more than anything to be multi-purpose and multi-surface.
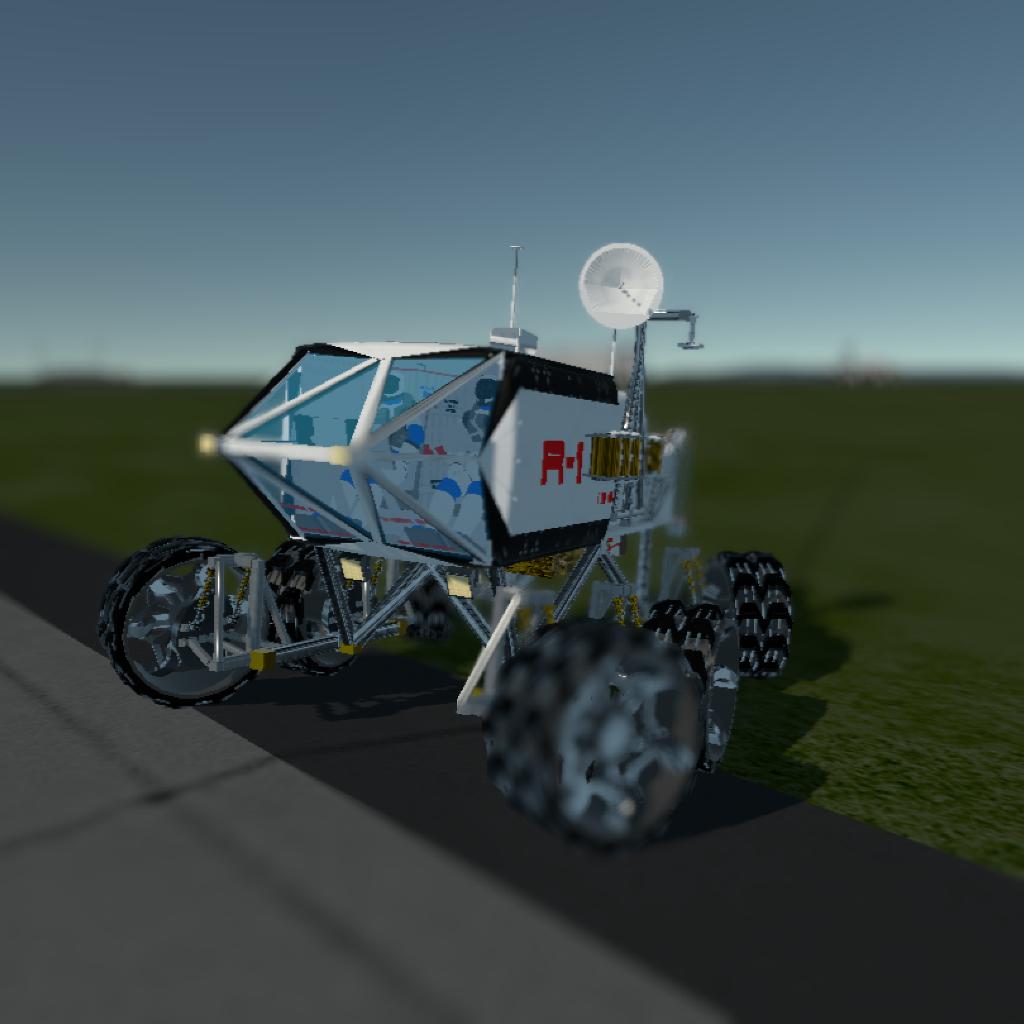
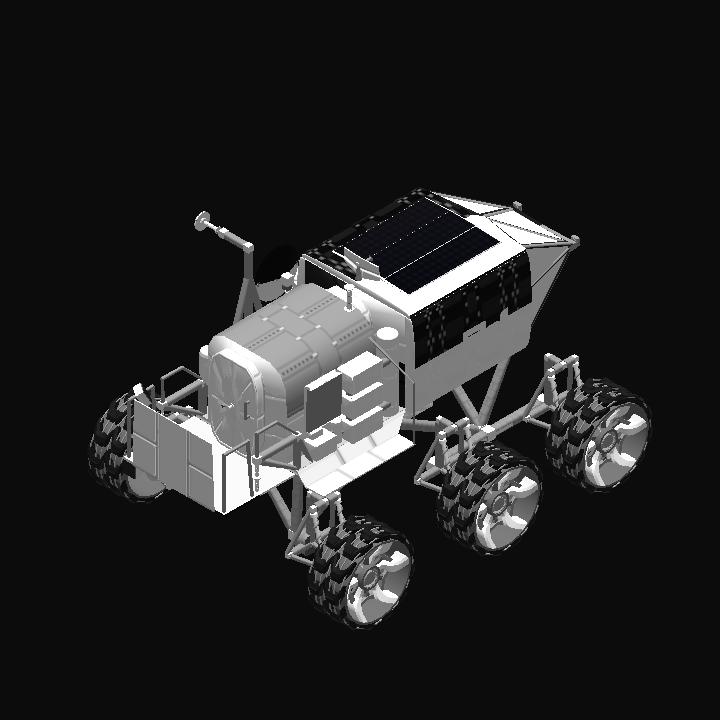
Equipped with an innovative hybrid suspension system, a combination of the rocker bogie system and H-Rover suspension. It really gives it incredible stability.
Only the rear part of the suspension is fixed, it was designed that way more than anything to have stability when accelerating.
It can cross a range of strange obstacles without getting stuck or tipping over, thanks to the front bogies, to avoid problems the maximum number of degrees was limited.
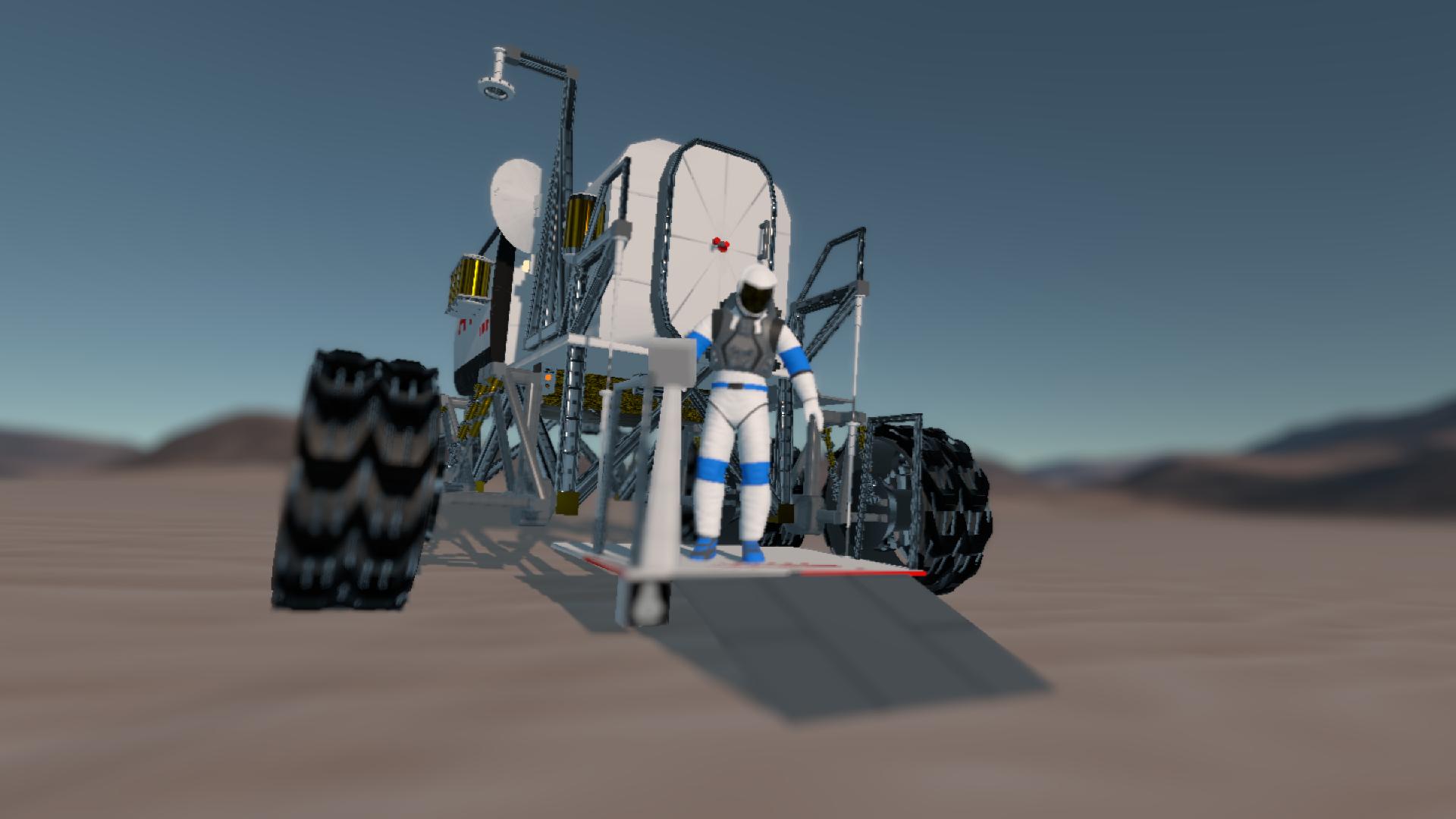
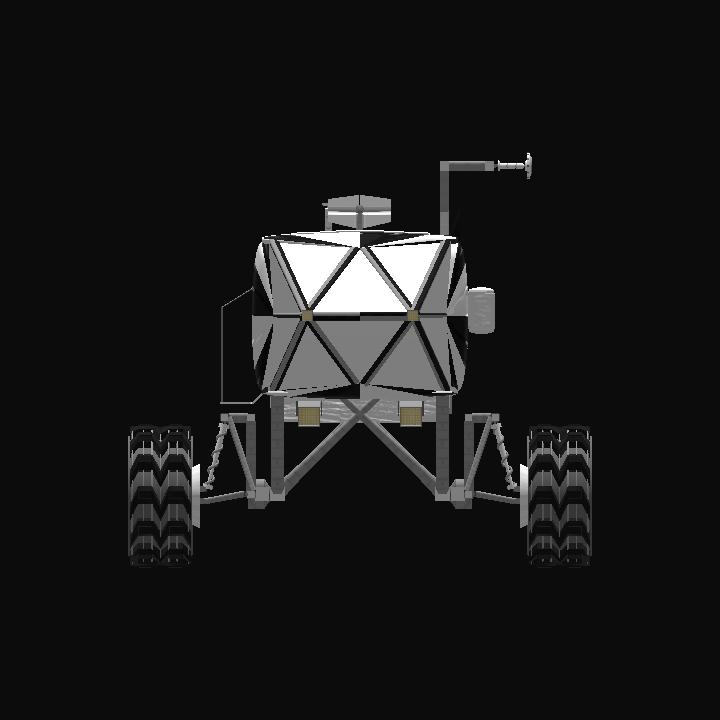
It has a lifting platform, this to facilitate access to the surface of the ground and avoid losing a member of the crew, mainly due to the height of the pressurized area.
It has enough details that give it a sense of realism.
It has a simplified cockpit interface but equipped enough to know where the Rover is going.
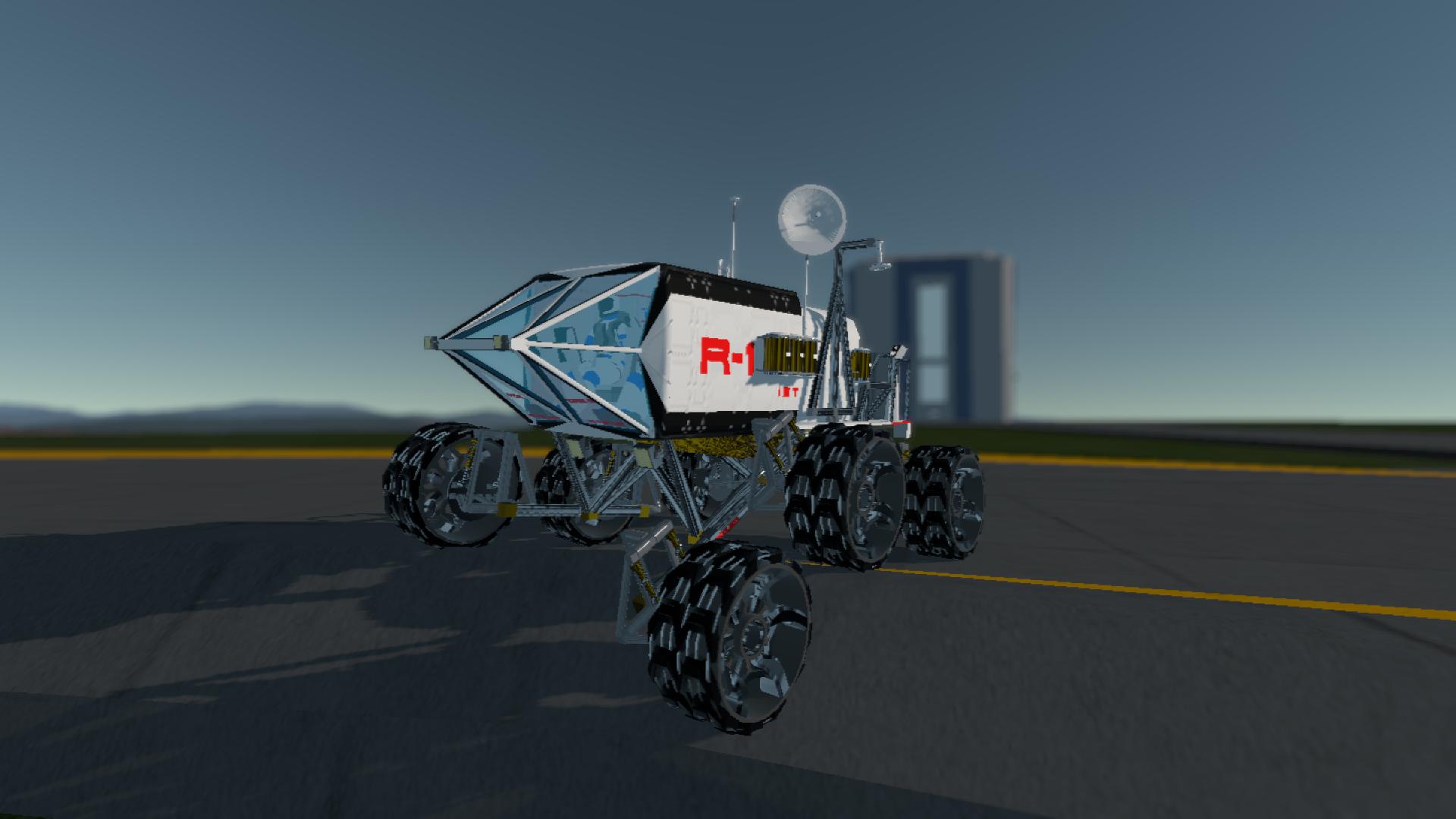
It has a small simple crane, it was added because it was incredibly useful, especially when moving batteries from vehicle to vehicle. Yes, batteries are a problem when you lose solar panels or you don't add them.
Can also be used to move small loads, small fuel tanks, and other attachable vehicles. The "hook" of the crane can rotate freely. The suspension compensates for the gyroscopic torque by the ballast. The size of the docking port can be adjusted depending on the need
Can carry up to three Drood's. It is less than the previous LRV but it really makes things a lot easier.
it is designed to be a safe driving vehicle, it does not need to be very fast.
It has a maximum climbing of 35°, you must carefully choose the route of the mountain that you are going to climb.
It still maintains a relatively small size.
The design of the window takes reference from the Simple Rover, but it was not copied, it was designed from scratch.
No pictures were taken on other planets as that would be cheating (New IST philosophy).
Wheel throttle is controlled by the pitch controls, turn thanks by yaw controls, it's easier to have more speed control in that way.
It is recommended to brake slowly with reverse pitch control and then use the main brake, this refers to a more mechanical braking.
In a way it was designed to be operated in first person by Drood's.
GENERAL INFO
- Created On: Android
- Game Version: 0.9.918.1
- Price: $851k
- Number of Parts: 660
- Dimensions: 4 m x 7 m x 8 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 7,905kg
- Dry Mass: 7,810kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|

This is actually pretty cool!