
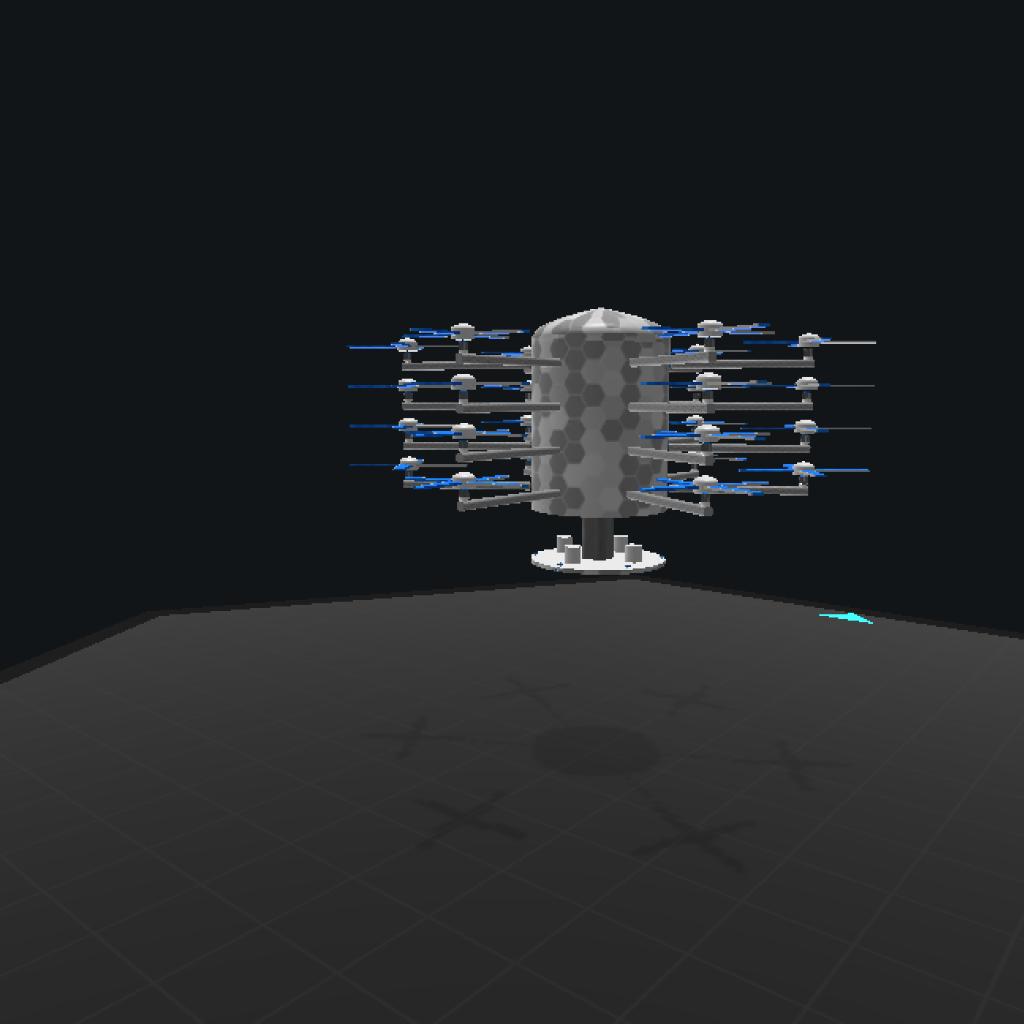
This is a quadruple decker drone running completely on electricity.
NOTE 1: Use slider 1 for upward or downward movement.
NOTE 2: Slider 1 is reversed,so to move in upward direction,it has to be maximized in negative direction.
NOTE 3: I used tinker panel to increase the take off velocity and improve weight management for the gyroscopes.
GENERAL INFO
- Created On: Android
- Game Version: 0.9.404.0
- Price: $2,853k
- Number of Parts: 238
- Dimensions: 6 m x 11 m x 13 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 1,001kg
- Dry Mass: -3,070kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|
No Comments
No Upvotes
Log in in to upvote this post.