
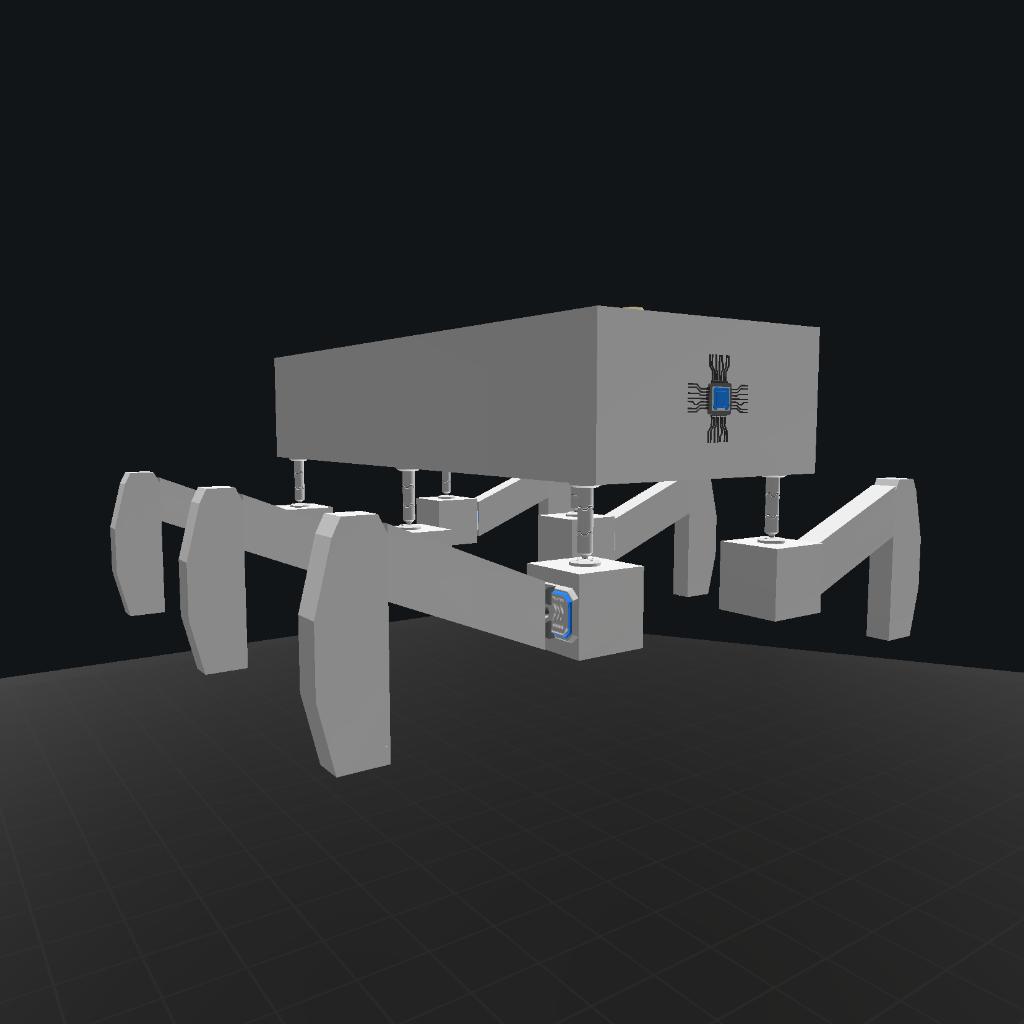
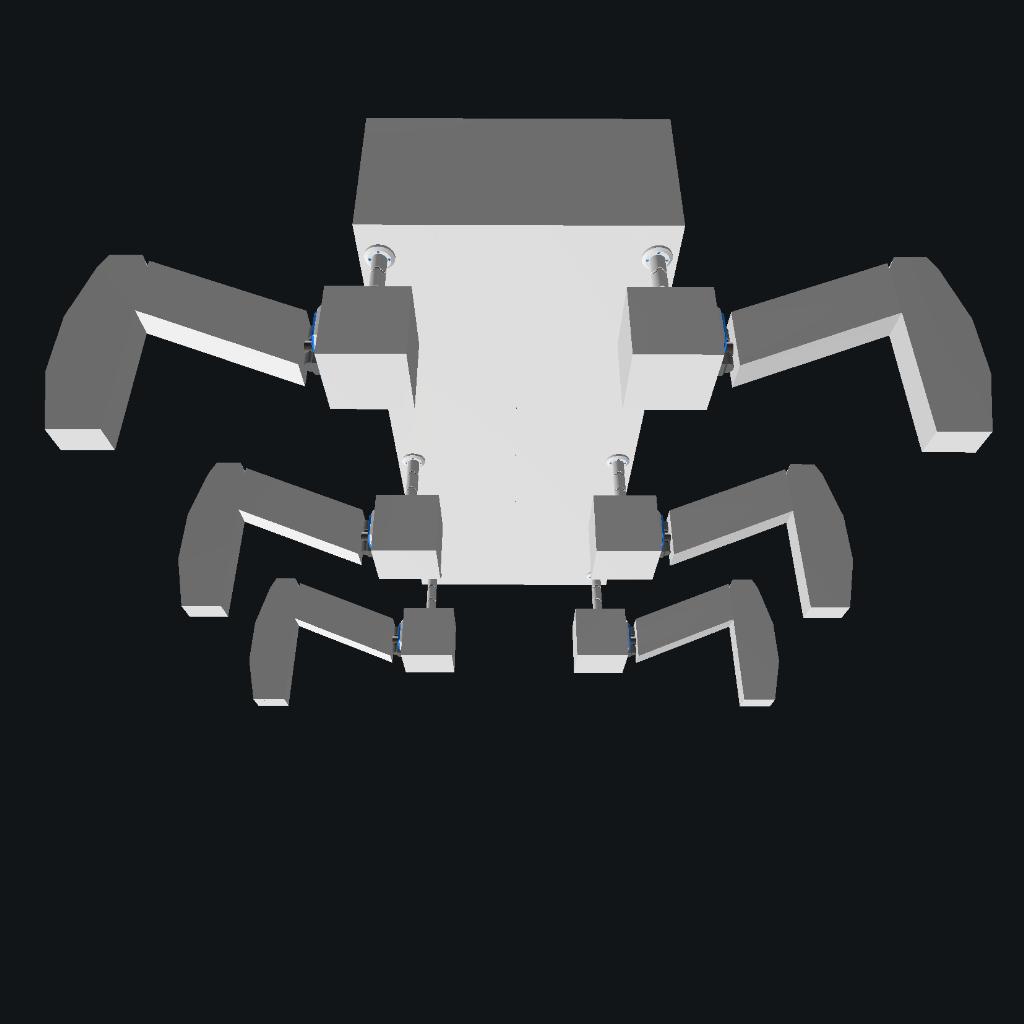
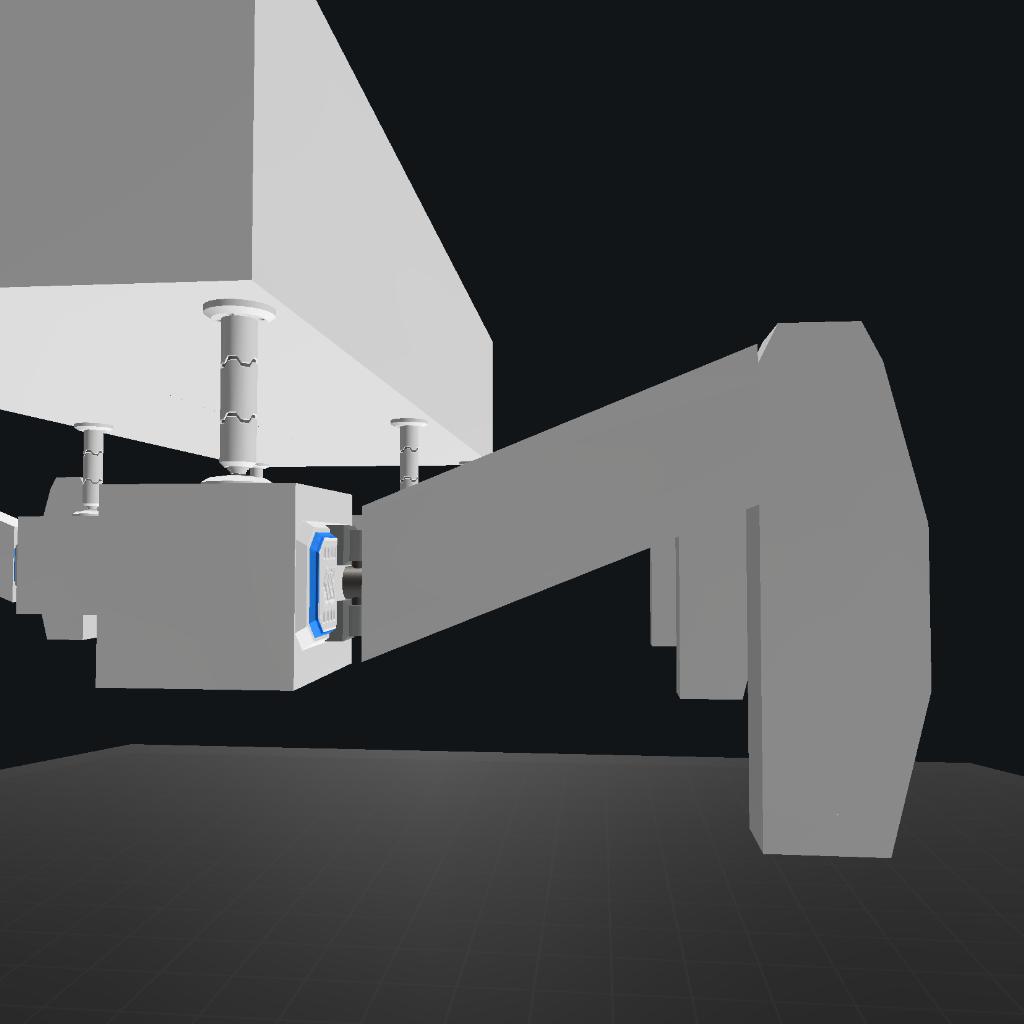
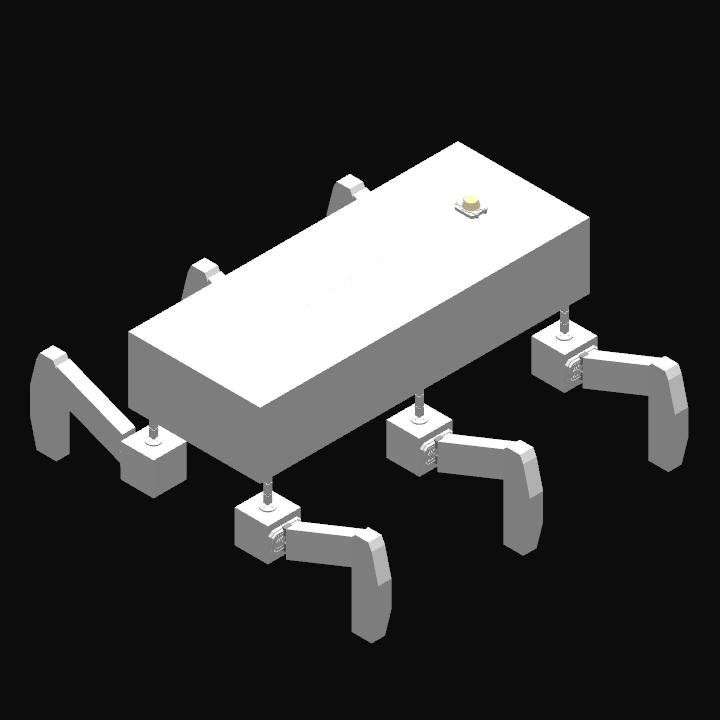
Basic proof of concept I made.
Problems:
When doing a quick walk cycle, front legs bounce a small amount after touching the ground
Body is very unstable when moving quick
Cant figure out how to make the vizzy code always see if act. 1 is on or off, leading to manual control after you turn it off the second time.
Things I plan to add:
Reverse
Sideways/crab walking
Automatic leg stopping when the bottom of it hits a raised surface (front half on climbing onto platform wont push the bottom half down)
An attempt at getting it to go over 2m/s, not sure how considering the rotor simply cant move that fast.
Better legs/feet
Suspension
GENERAL INFO
- Created On: iOS
- Game Version: 0.9.918.1
- Price: $751k
- Number of Parts: 70
- Dimensions: 3 m x 5 m x 5 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 30,950kg
- Dry Mass: 30,940kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|
4 Comments
- Log in to leave a comment
-
3,065 unimaginablekatana2.4 years ago
@Jerba the vizzy looks a little weird if u ask me, but I'm not really good with it so I don't know
-
692 Jerba2.4 years ago
Thanks, let me know if you find any problems that I haven’t listed! @unimaginablekatana
-

Yea I have no idea how to vizzy, just used it to make an automatic walk cycle@unimaginablekatana