
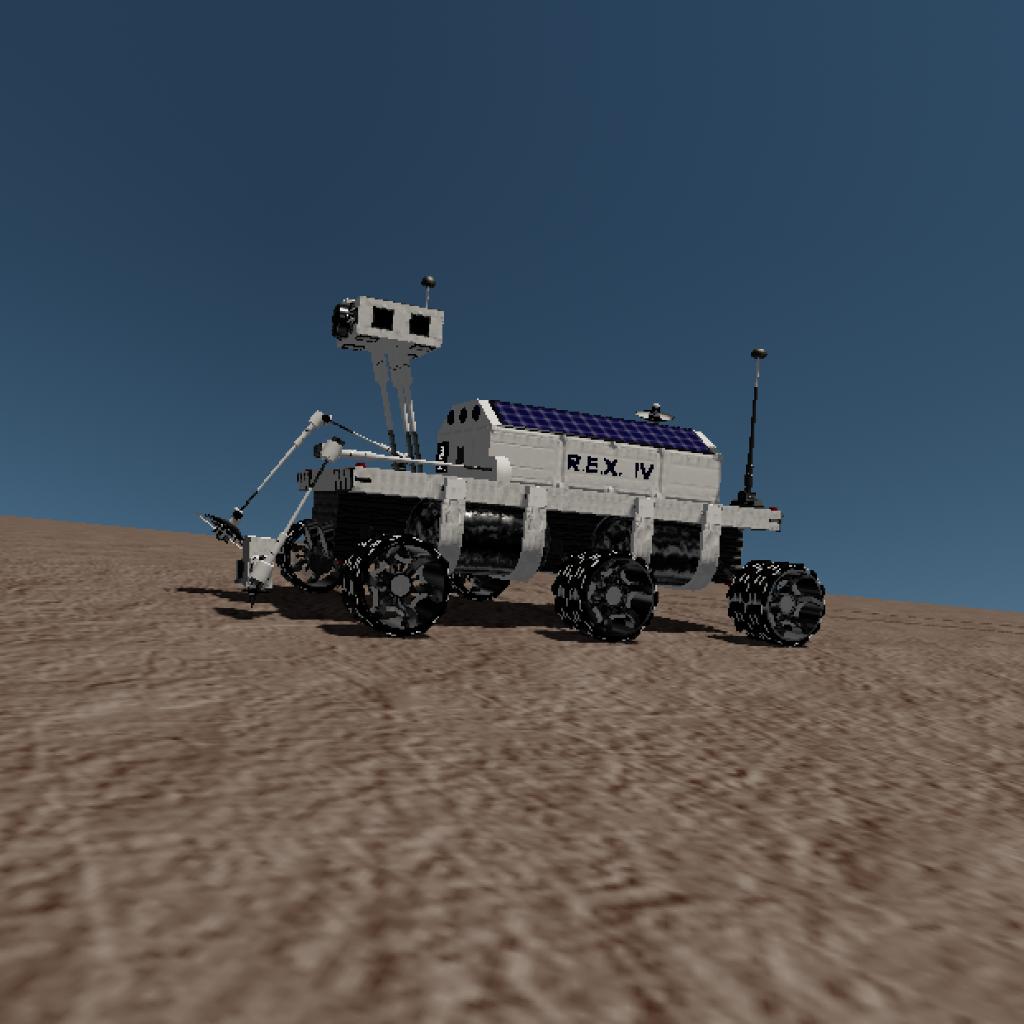
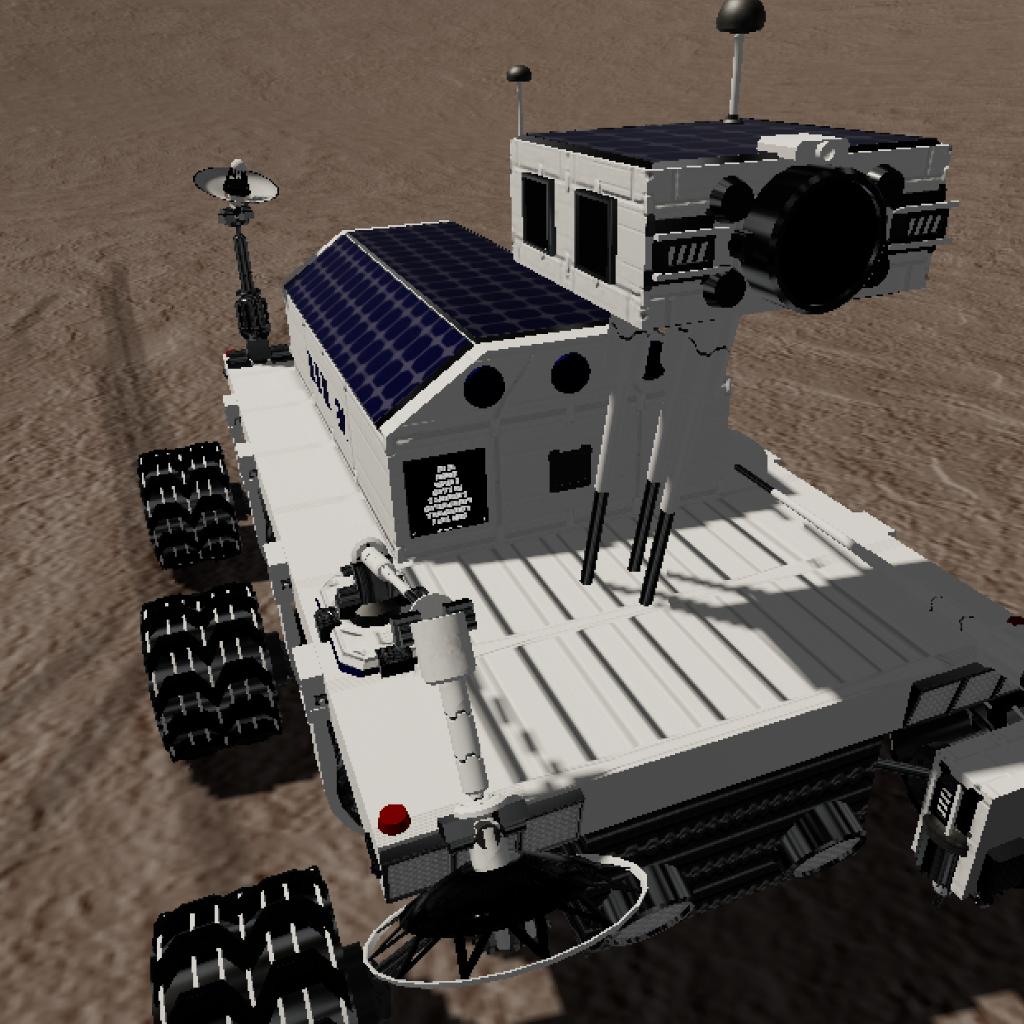

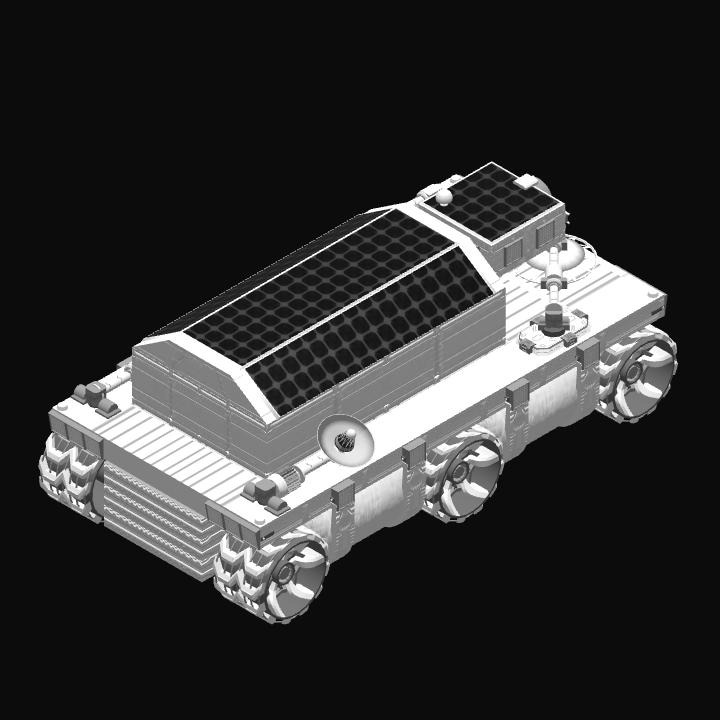
This rover features a vizzy autopilot, you use the throttle to set the speed and then the computer balances the rover at that speed. AG3 will use a vizzy program to deploy the rover and unfold all the equipment. AG8 will stop the rover and use a vizzy program to collect samples with the drill and sub-scanner on the front.
If the rover begins to flip, the Autonomous Atitude Control System will put the game into slo-mo and use gyroscopes to correct the attidude.
This is very useful when you drive over rough terrain with low gravity.
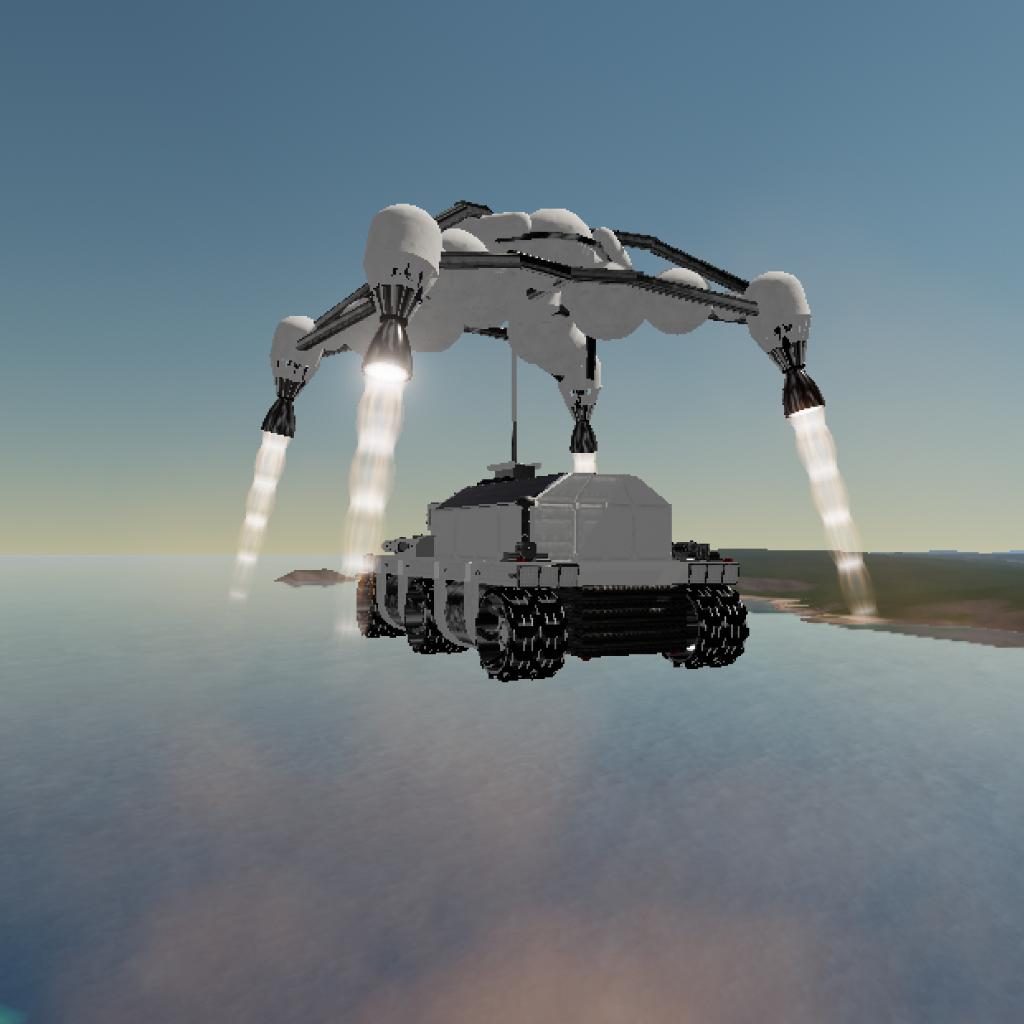
I am also working on a skycrane fro the rover but its not finished yet.
GENERAL INFO
- Created On: iOS
- Game Version: 0.9.616.1
- Price: $1,322k
- Number of Parts: 164
- Dimensions: 1 m x 2 m x 3 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 4,629kg
- Dry Mass: 3,281kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|
4 Comments


8 Upvotes
Log in in to upvote this post.
Wow, thanks @GSpace
I haven’t been playing long