

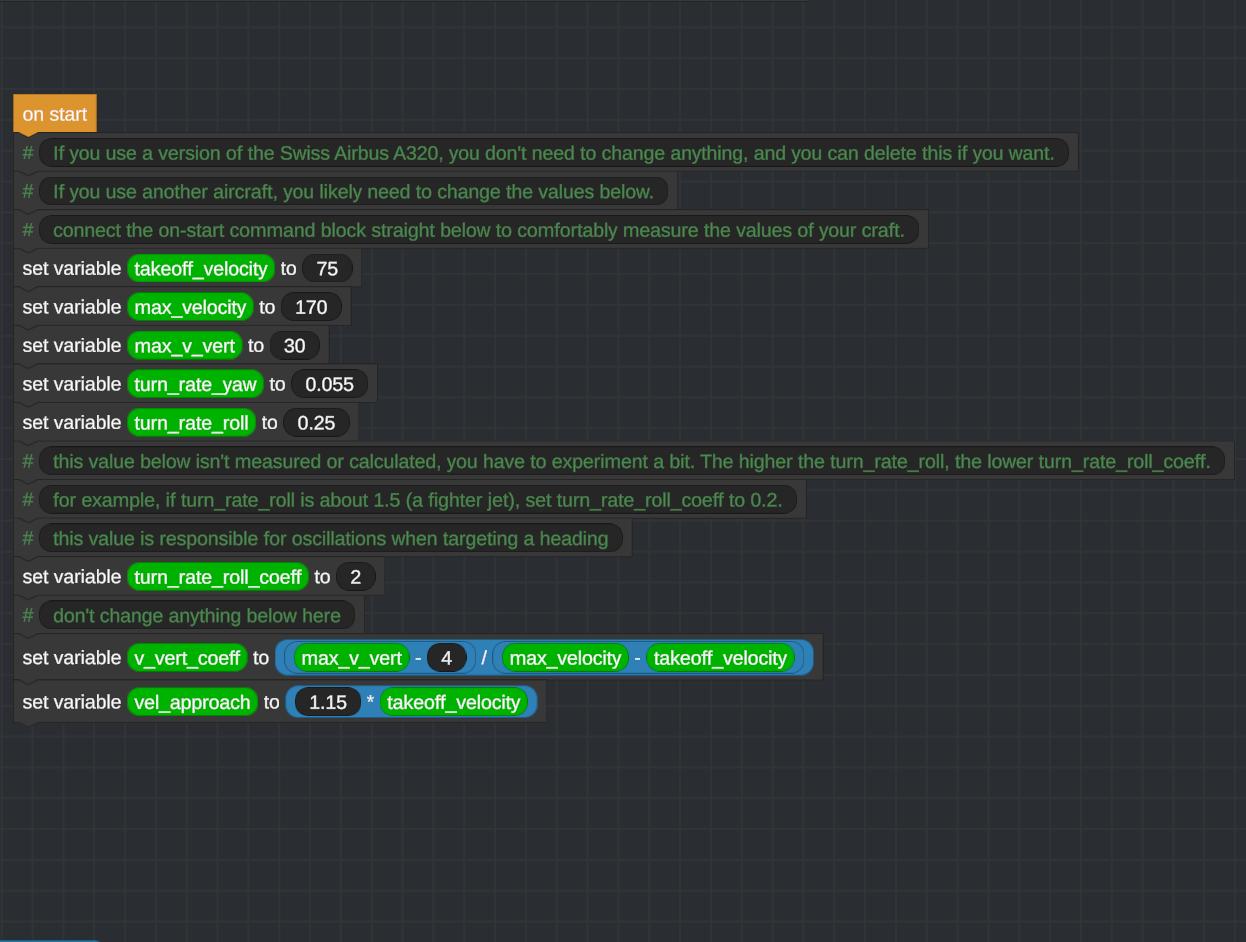
This is just the autopilot program for the mobile-friendly version of the Swiss Airbus A320.
https://www.simplerockets.com/c/BylX0u/Swiss-Airbus-A320-400-parts
VERY IMPORTANT!!
you must enable AG1 - AG4 by naming them. I suggest:
AG1: set altitude
AG2: set heading
AG3: set speed
AG4: set approach
With only a few changes, this autopilot program can be used on any other aircraft. Please read my comments in the vizzy code for further instrucions. For any questions, feel free to ask. Also let me know if my comments are clear enough.
GENERAL INFO
- Created On: Windows
- Game Version: 1.1.109.0
- Price: $0k
- Number of Parts: 1
- Dimensions: 0 m x 1 m x 1 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 1kg
- Dry Mass: 1kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|

11 Comments
- Log in to leave a comment
-
397 BenjaminK2.5 years ago
@1918 I'm so sorry for my delayed response, I must say this aircraft is a lot harder to calibrate than the one before. What I found to be problematic was the craft's refusal for any change in pitch (it would always jump back and forth after you let go of W or S or oscillate after every small change from the autopilot). I tried a few things to keep this minimal but nothing worked (decreasing the deflection speed kind of worked but it didn't change the root of the problem) and I have absolutely no idea why it does that so strongly. But I'm not the best at this "technical" building, so probably you can do it better. I think when it's similar to the aircraft before, it will be possible to calibrate or it can even reuse the same program. Don't hesitate to ask or let me how it went!
-
-
397 BenjaminK2.5 years ago
@1918 no worries! I'm currently a bit busy but I will take a look when find some time (might be around wednesday)!
-
640 19182.5 years ago
Sorry for the repetitiveness.
I am trying to implement autopilot for the following aircraft based on the aforementioned advice.
However, this does not fit well. I would appreciate any advice you can give me.
https://www.simplerockets.com/c/1PT9x3/TSR-2-Test -
-
640 19182.5 years ago
@BenjaminK
Thank you very much. Now I can complete my aircraft.
By the way, the performance of your autopilot is very good.
I am using the A320 Vizzy for these aircraft and was able to adapt it easily.
Thanks to you, I was able to complete these aircraft.
Again, thank you very much.
https://www.simplerockets.com/c/FLE89A/Mitsubishi-MU-2
https://www.simplerockets.com/c/k44oxy/C-X -
397 BenjaminK2.5 years ago
@1918
I couldn't help myself and improved my suggestions a little bit more.
The maximum ascend/descend velocity now takes the velocity of the plane in account (the faster you fly, the faster your vertical velocity can be). The equation was set up in a way so that the ascend rate at 200m/s is about 40m/s and at 1000m/s 250m/s. I also changed a few values again.The same kind of problems existed for the heading, and I basically made the same changes to the keep heading program. Because the turning rate (vel ang y) is lower at higher speeds, I introduced an equation to take that into account as well. The plane has now more or less the same bank angle at different speeds when changing the heading. Previously, the plane tried to achieve the same high turning rate at high speeds that resulted in it inverting and eventually crashing.
I tried to fix the oscillation when targeting a speed which is now partially gone, there is still a little bit left. I had to increase the control surface deflection speed for the roll axis so the program has more control over the deflection and doesn't lag behind.
I also made the autotrim slightly more aggressive, but I'm not sure if there's a noticeable difference.
The control surfaces kept snapping off, and I eventually removed the drag on them completely.
And I forgot to turn the default AG5 (auto trim) state back to on.
I think that's it, let me know if you need anything!
https://www.simplerockets.com/c/Me4qa8/1918-test-plane-with-updated-autopilot -
640 19182.5 years ago
@BenjaminK
Thanks for the reply. I am honored by your compliments about the aircraft.
As for your advice on FBW, we are newbies and cannot understand your advice as well as we would like.
Could you please upload the corrected version?
I would like to compare the two versions for better understanding. Thank you very much. -
397 BenjaminK2.5 years ago
@1918 It makes me happy that you wanna use this program!
So I took a look (your plane is absolutely beautiful, the landing gear system is amazing!!) and tried a few things. It seems that your plane's max pitch turning rate (velangx) is a bit lower and requires more pitch input to achieve the same angular velocity. This obviously messes with the autopilot and I didn't think about that at the time.
I also tried to be clever with limiting the max vertical rate so that a stall at low speed could be avoided, but in this case your plane is very powerful and doesn't need it.
There also seems to be a missing variable almost at the end of the line "set variable requiredvvert" where there is now a "5" instead of the variable maxvvert (this limits the maximal ascend rate to 5m/s).But those are easy fixes:
change the "set variable requiredvvert" line of the thread "receive set craft input with data" so that it looks like this: "set variable (requiredvvert) to (max of (min of (((data - altitudeASL)/10) and (maxvvert)) and (-1*(maxvvert)))
not sure about the parantheses in that one :Dchange the number 120 in the line below to 700 (this accounts for the lower velangx)
change the number 1 in the line below the previous to 3 (this accounts for the higher input needs)
and change the number 0.4 of the line "set pitch to" to 1 for increased effectiveness of the control surface.
I would suggest to change the value of the variable "maxvvert" to a higher value since your plane is capable of it (I set it to 100 in my tests but you can try a few different values).
Let me know it it works and if my tips are understandable at all :D
I also tried out the heading and speed autopilot and tweaked a few values, so if you're interested a can give them to you as well.
I can also upload my tweaked craft if you want. -
640 19182.5 years ago
Please excuse my abrupt comment.
I am building a large aircraft that incorporates your fly-by-wire, but the set altitude function is not working properly.
If it's not too much trouble, could you please tell me how to improve it?
The current aircraft is as follows.https://www.simplerockets.com/c/1fBj8r/Test

@BenjaminK
Thanks for the reply. Indeed, it was nonsense to install a system for passenger aircraft on an attack aircraft due to the nature of the aircraft.
Sorry for the trouble.