
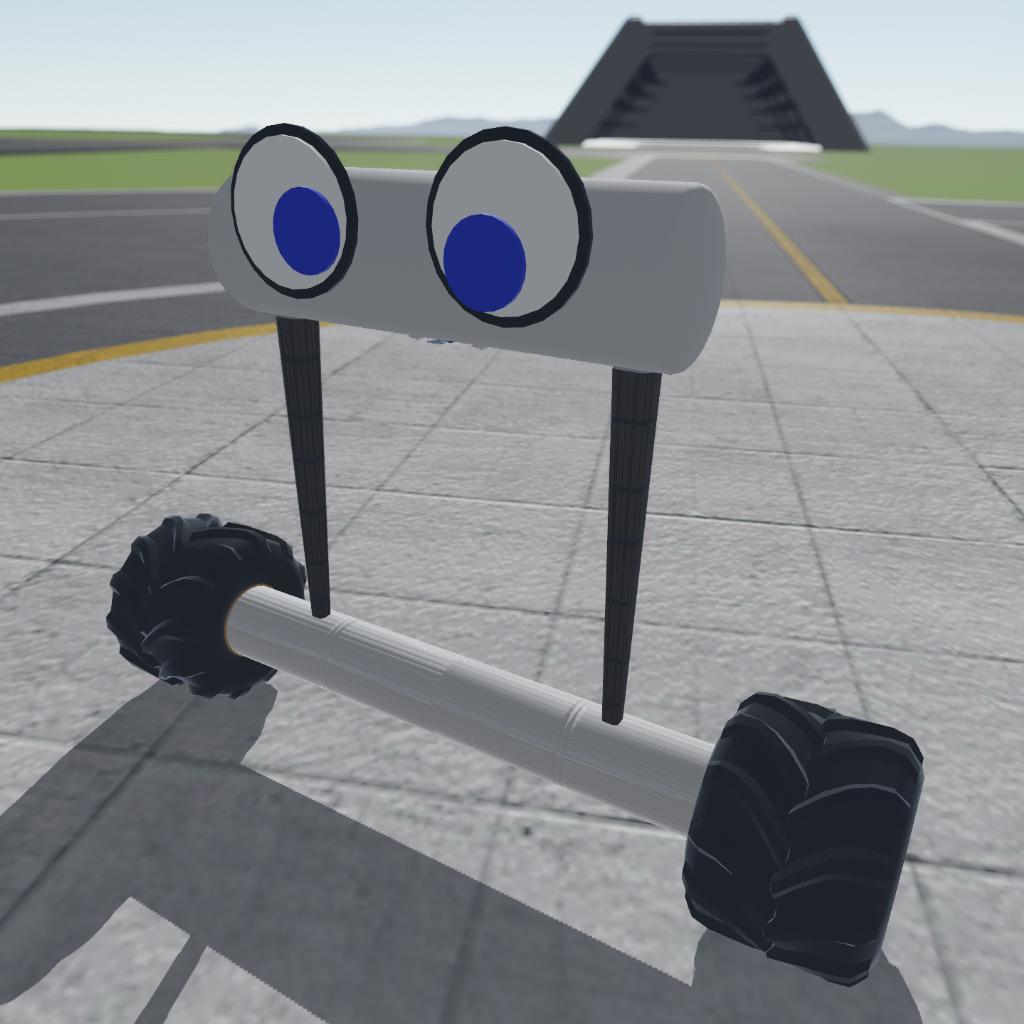
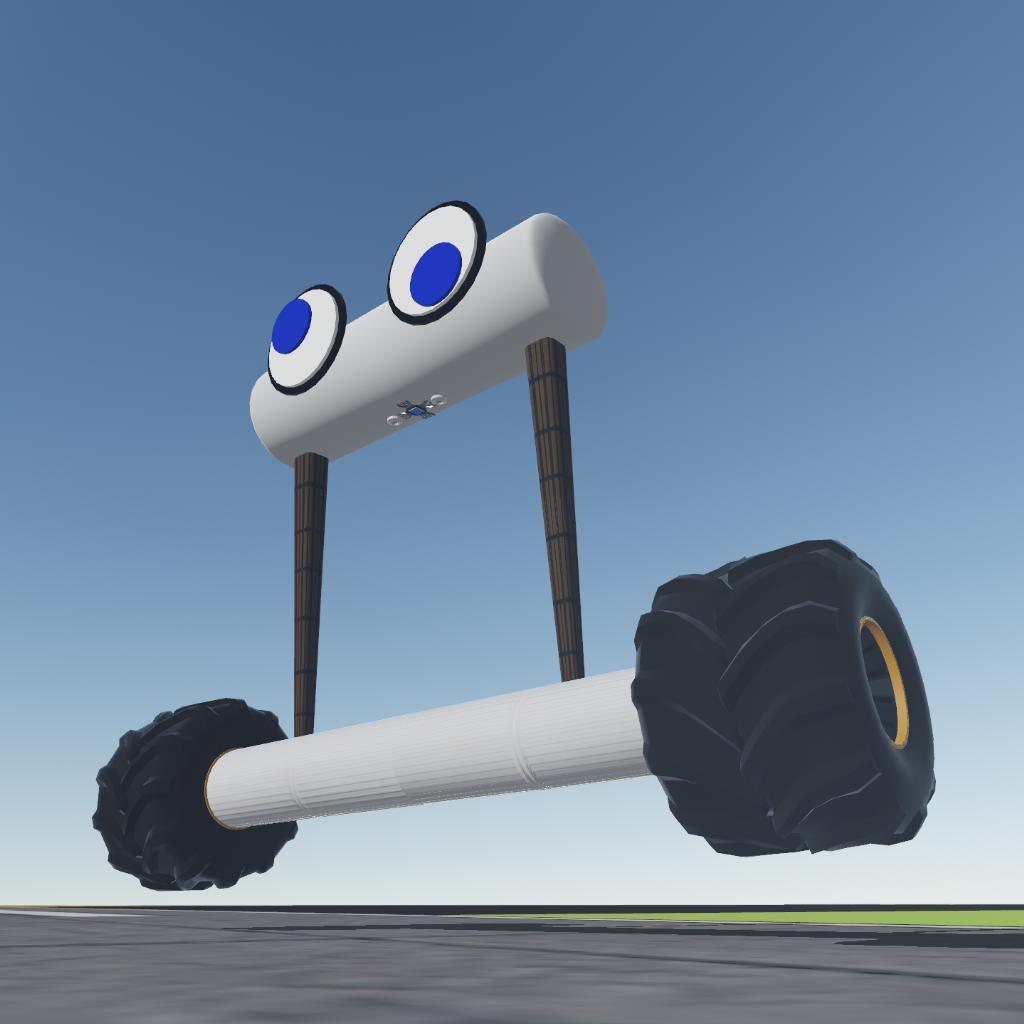
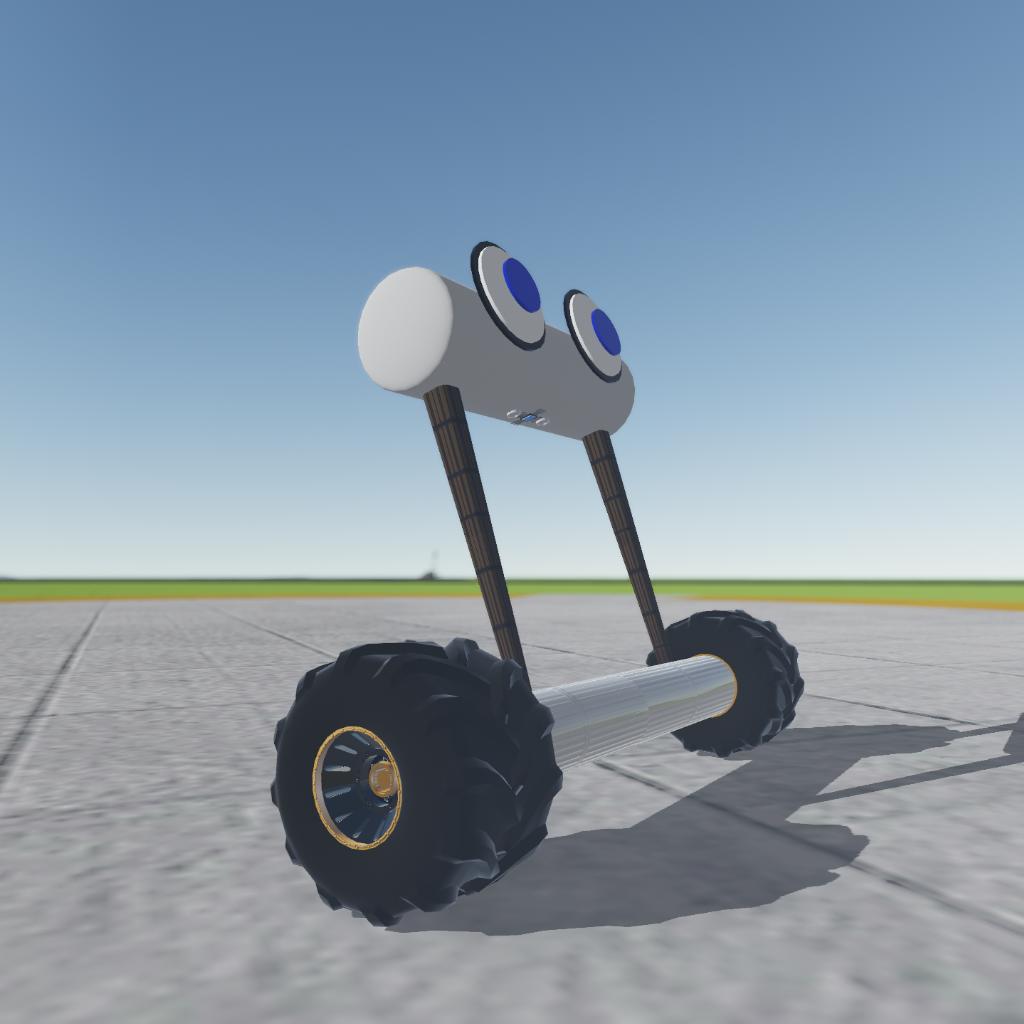
This is a self-balancing robot using Vizzy. Using it is simple, just pitch and yaw to move. If you want an extra challenge, disabling AG 1 and 2 will let you drive faster and turn harder.
I'm using a PID controller algorithm for stabilization. It's looking at the current pitch, and adjusting the wheels accordingly.
Note: small airtime is fine, but be careful with more serious off-roading and jumps, especially at higher speeds. Tested on Droo, so your mileage may vary on other planets.
GENERAL INFO
- Created On: Windows
- Game Version: 0.9.404.0
- Price: $236k
- Number of Parts: 24
- Dimensions: 8 m x 10 m x 2 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 19,438kg
- Dry Mass: 2,105kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|
3 Comments

6 Upvotes
Log in in to upvote this post.
Can't believe I missed this originally. I tried making a segway and failed miserably and here you go making it look easy. Nice job.