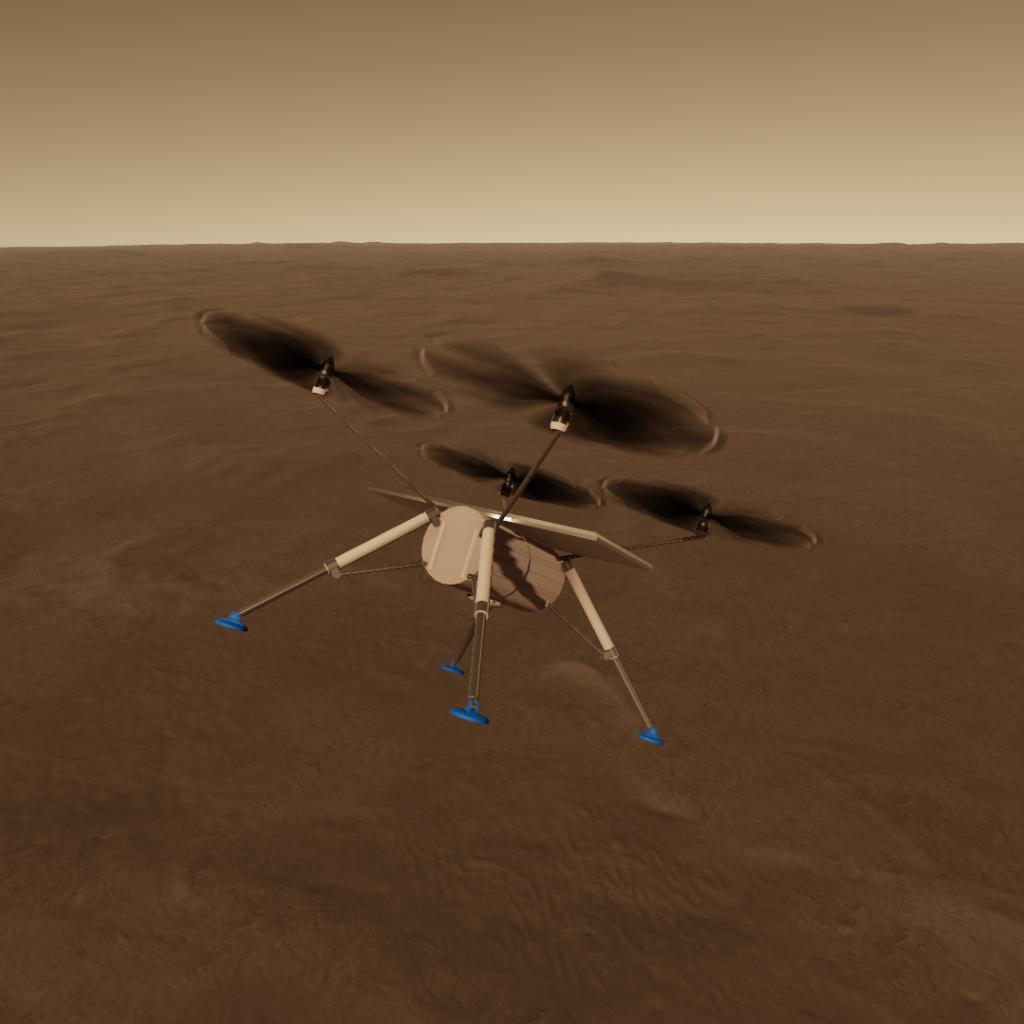

A simple quadcopter tested to fly on Mars (tested with Real Solar System). All controls are already implemented, including an autohover script. Pitch and Roll are implemented via differential blade pitch, Yaw is implemented through differential throttle. Thrust modulation is implemented through alteration of blade pitch for quick response. Overall this is a quite nimble, maneuverable, and pleasant to fly quadcopter that works in the environment of Mars.
It can take a while for the rotors to initially spin up so it can take off, please be patient.
AG6 = locks up all rotors, resets all variables. Useful for transportation and resetting the controller in case something went wrong.
AG7 = autohover at desired altitude.
A docking port is included for ease of transportation on a rocket.
The main downside: it only has enough battery life for 9 minutes of flight, during which you have to land, and then has to recharge for several hours.
Fairly minimal usage of the tinker panel, within realistic bounds (only to make a few parts smaller than normally possible).
NOT TESTED ON ANY OTHER PLANET
NOT TESTED WITH THE GAME'S HEADING LOCK (because the controller already implements PID control on its own)
GENERAL INFO
- Created On: Windows
- Game Version: 1.2.210.0
- Price: $156k
- Number of Parts: 21
- Dimensions: 1 m x 1 m x 2 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 31kg
- Dry Mass: 31kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|