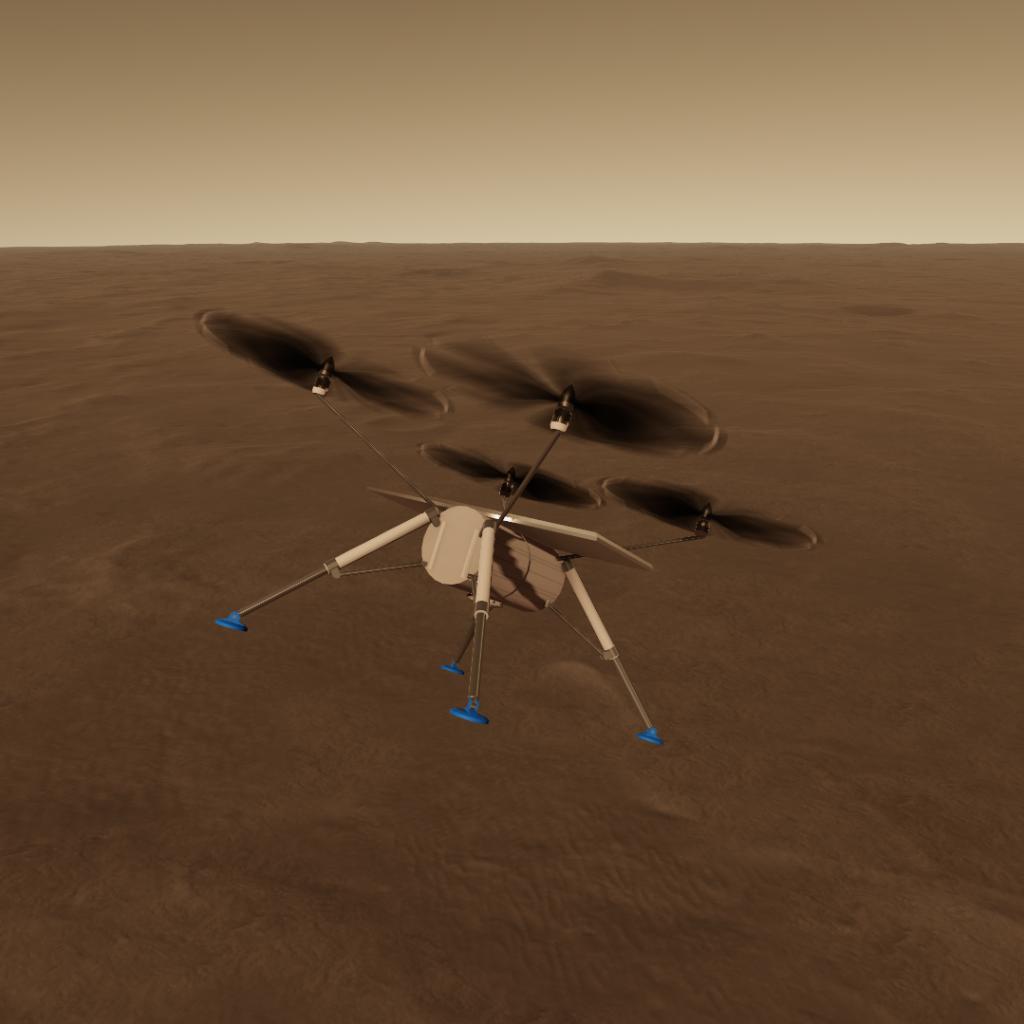
A simple quadcopter tested to fly on Mars (tested with Real Solar System). All controls are already implemented, including an autohover script and an autokill lateral script. Pitch and Roll are implemented via differential blade pitch, Yaw is implemented through differential throttle. Thrust modulation is implemented through alteration of blade pitch for quick response. Overall this is a quite nimble, maneuverable, and pleasant to fly quadcopter that works in the environment of Mars.
It can take a while for the rotors to initially spin up so it can take off, please be patient.
AG5 = autokill lateral. Useful to stop where you want and make landings easier.
AG6 = locks up all rotors, resets all variables. Useful for transportation and resetting the controller in case something went wrong.
AG7 = autohover at desired altitude. It very gently and slowly climbs or descends to the target altitude, so entering a low value can be a relatively easy way to approach for a landing.
A docking port is included for ease of transportation on a rocket. WARNING: MAKE SURE TO SET ORIENTATION TO PLANE BEFORE CONNECTING IT TO YOUR ROCKET OR IT WON'T WORK CORRECTLY ONCE YOU LAND ON MARS.
The main downside: it only has enough battery life for 9 minutes of flight, during which you have to land, and then has to recharge for several hours.
Fairly minimal usage of the tinker panel, within realistic bounds (only to make a few parts smaller than normally possible).
NOT TESTED ON ANY OTHER PLANET
NOT TESTED WITH THE GAME'S HEADING LOCK (because the controller already implements PID control on its own)
Update v1.3:
- Backported all code improvements and bug fixes from the latest version of my Career Cargo Quadcopter v1.1
- Fixed a minor bug with the autohover in time warp that is still present in Career Cargo Quadcopter v1.1 (I'll port this bug fix there as well soon)
- Tweaked a lot of the values in the code to make this easier and more pleasant to both fly and land. Overall this should be the most pleasant to fly version of the Mars Quadcopter. In my testing I managed to reach a maximum speed of Mach 0.96 (though after that I started irreversibly losing altitude until I crashed)
GENERAL INFO
- Predecessor: Mars Quadcopter v1.1
- Successors 1 craft(s)
- Created On: Windows
- Game Version: 1.2.210.0
- Price: $156k
- Number of Parts: 21
- Dimensions: 1 m x 1 m x 2 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 31kg
- Dry Mass: 31kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|