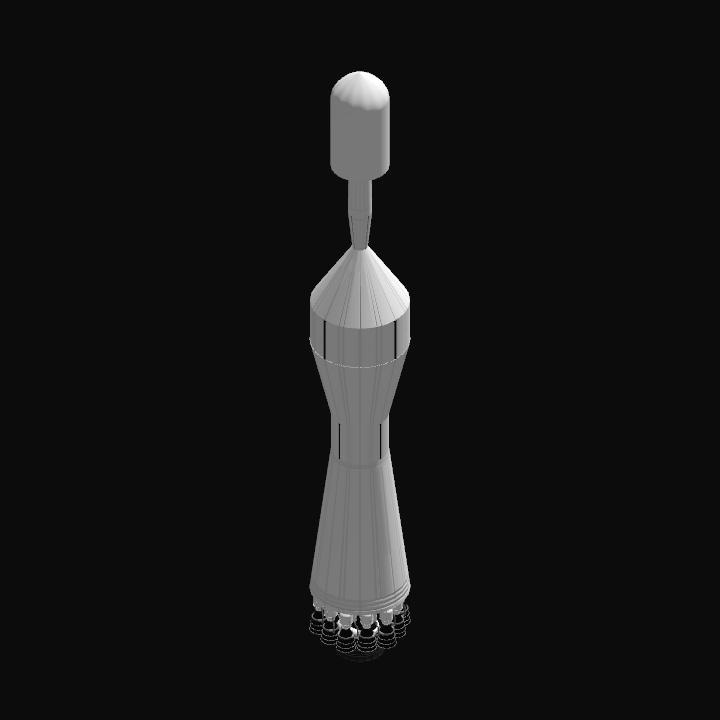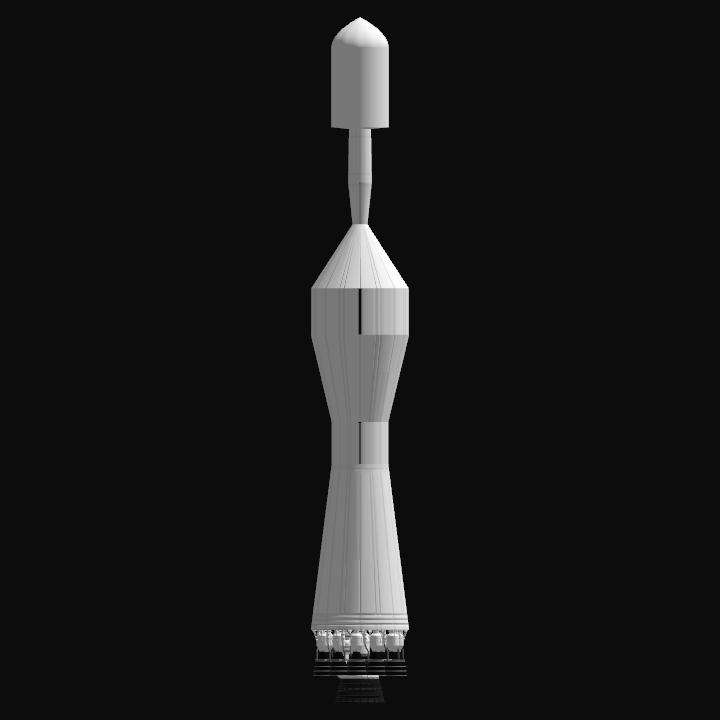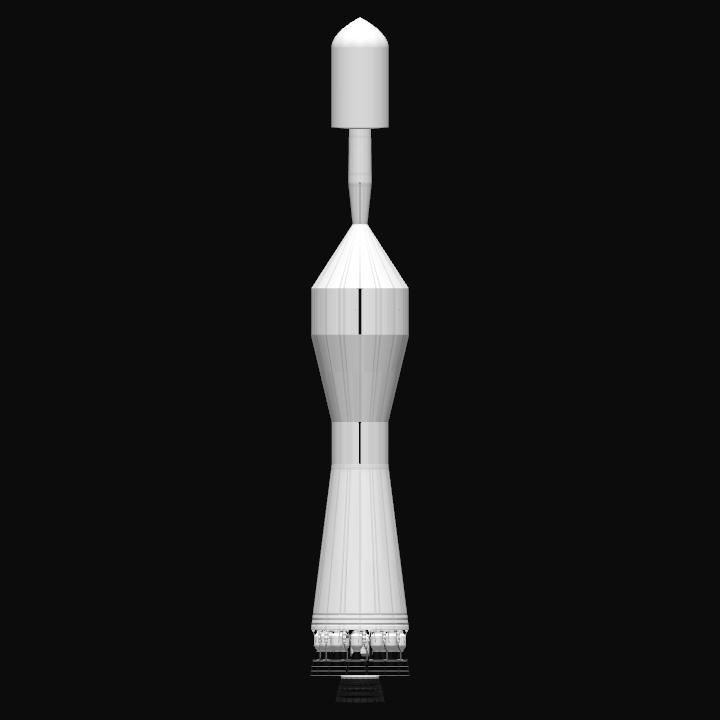
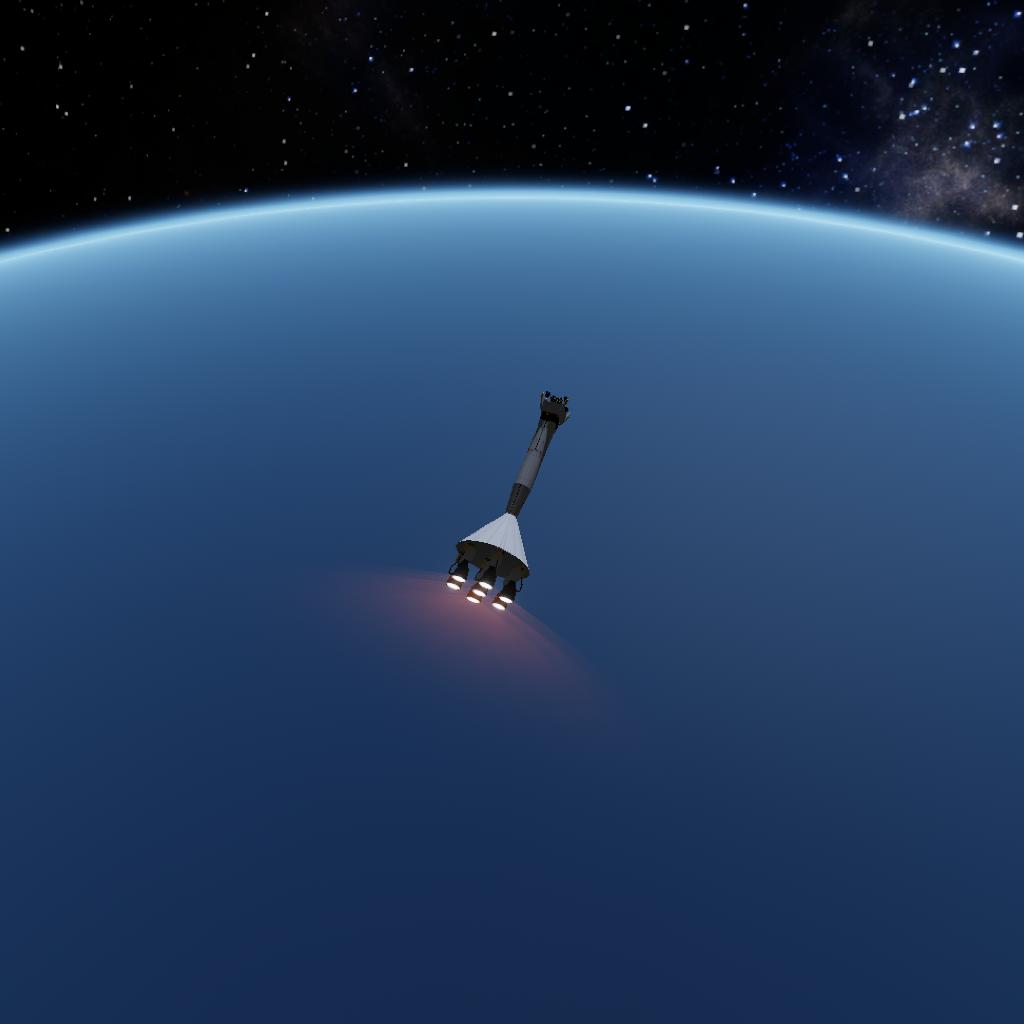
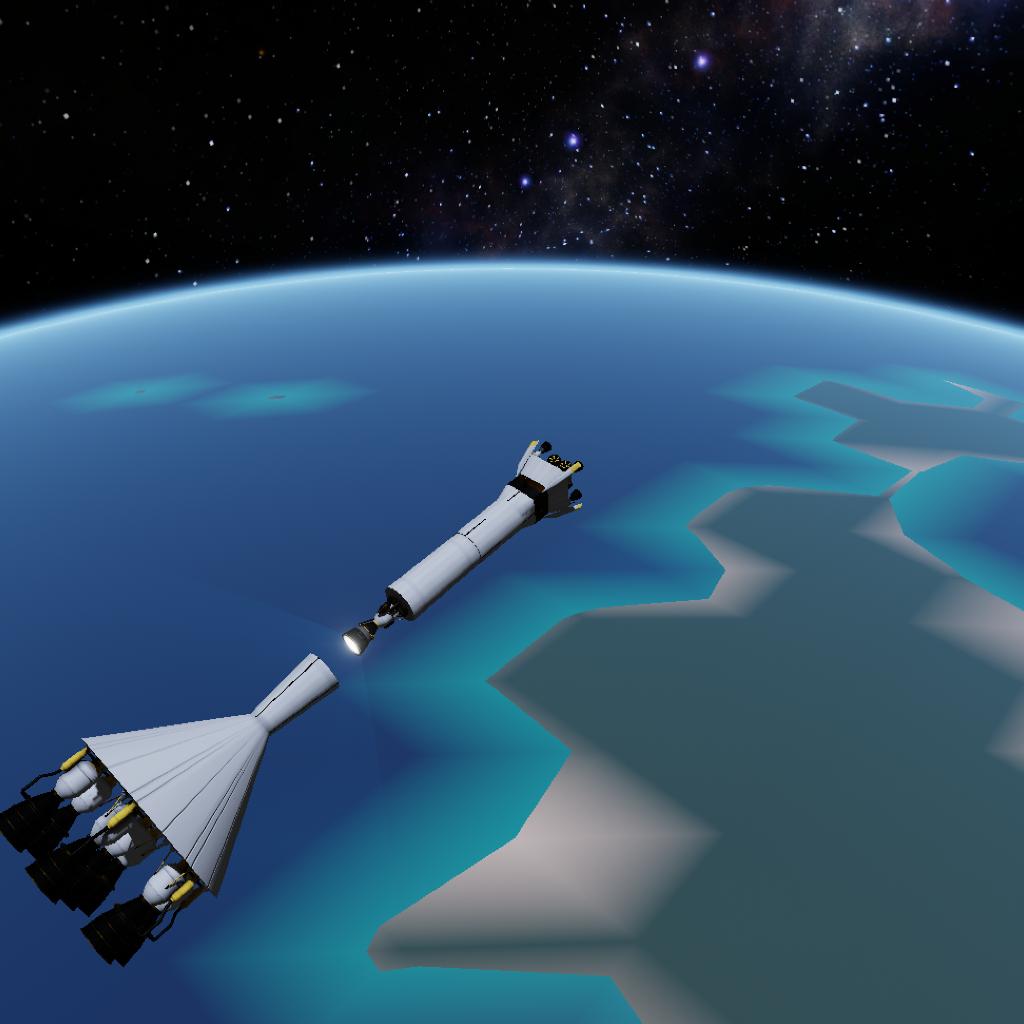
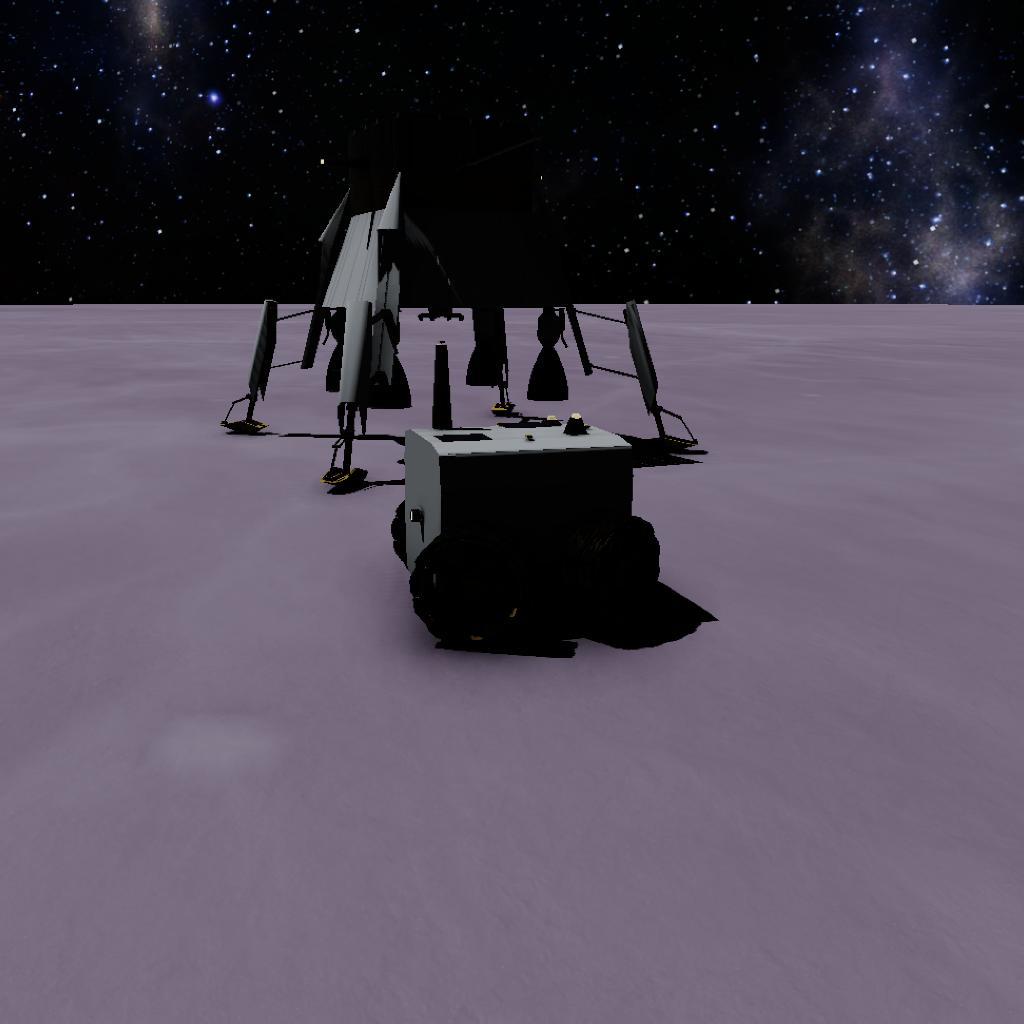
The Icous Rover Complex is a lander and rover designed to land on Orcus. It was designed by Piano Aerospace, and was launched upside-down relative to the rocket, like the Londerburst HiTempSerg complex. They used the Gufuois launch vehicle to launch it. The stage adapter with seven ion engines helped the lander get into orbit around Orcus. The lander contaned some tools to transmit information, some lights, power genarators, large non-gimbaling engines, and also a large battery (command disk) and gyroscope. The rover has 4 cameras, 2 antennas to transmit/recive information, a pole to study Orcus, and also a baseless RTG and 2 mini solar panels. This time the rover’s futuristic-looking wheels have suspension, the first time in PZL history. The rover’s design is slightly poor but can still drive around Orcus well. It’s max speed is 10m/s, however the recomenneded max speed is 5 m/s. The system mainly drills into the surface to find the compisition of the moon, takes pictures/studies the surface, and finds the mysteries of the moon.
Controls:
Normal rocket controls.
AG1: headlight.
AG2: rover transmitter light.
AG3: rover reciver light.
AG4: camera/science pole.
AG5: lander lights.
AG9: solar panels (for lander).
Rover controls:
Pitch - move forward/backward
Roll - turn left/right
Notes:
Spoiler alert: there’s a LOT of notes.
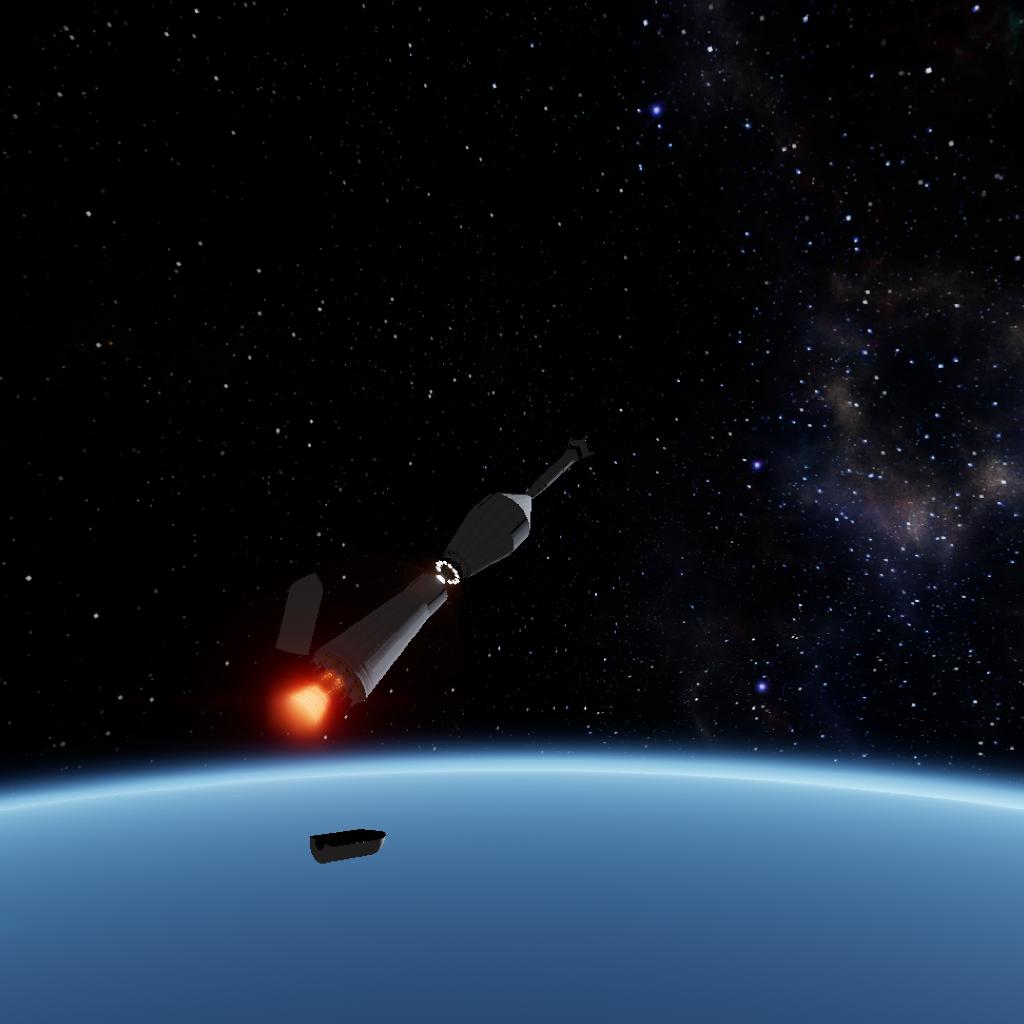
As I mentioned, the lander is upside-down relative to the rocket. That means if you want to do a retrograde burn, point prograde. Another example is if you want the lander to face up, lock down. The adapter stage is right-side up though.
When you detach the rover from the lander, both parts of the complex will bounce. When it bounces, try to make the rover go forward or backward. That will most likely make the rover less likely to flip over. Once you get out of the lander’s shadow, you may turn on all the activations and drive around. As I mentioned, the max speed of the rover is 10 m/s, but it’s recomended to only go a max of 5 m/s to minimize the chances of the rover flipping over.
Why I didn’t go for gimbaling engines is because if you used gimbaling engines, the lander would totally spin out of control and crash. Usually it nose dives. I initially wanted to put in gimbaling engines, but after testing and found that out, I switched to non-gimbaling. Before I even considered gas engines, I tried ion engines and activating them blows up the lander and rover. Not to mention, most of the craft is heavily tinkered using the tinker panel and hidden properties. Initially, I didn’t want the complex to be upside down, but after trying, right-side up won’t work because of the rover at the bottom of the lander, which meant I was stuck at upside-down.
There is a bug where the rotator doesn’t work with AG1 off. If you keep AG1 on, the pole (AG4) will deploy. Fixed version will hopefully come out soon, but you can just fix it yourself because it is an easy fix. Just find the hinge rotator which moves the pole up and down, go into the hidden properties (access it from the tinker panel in part properties), go to the modifier called InputController and change the string of “Input” from AG1 to AG4.
Sorry about this long description…
But…
Enjoy exploring Orcus!
GENERAL INFO
- Created On: iOS
- Game Version: 1.3.114.0
- Price: $1,720,141k
- Number of Parts: 95
- Dimensions: 175 m x 25 m x 25 m
PERFORMANCE
- Total Delta V: 78,572,651,806.7km/s
- Total Thrust: 282.6MN
- Engines: 45
- Wet Mass: 1.16E+7kg
- Dry Mass: 9.84E+5kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|---|---|---|---|---|
| 1 | 13 | 2.5km/s | 166.4MN | 1.9m | 1.16E+7kg |
| 3 | 13 | 1.3km/s | 37.7MN | 1.9m | 3.94E+6kg |
| 6 | 7 | 2.7km/s | 60.3MN | 71s | 2.59E+6kg |
| 8 | 1 | 735m/s | 7.9MN | 63s | 7.62E+5kg |
| 10 | 7 | 78,572,651,806.7km/s | 6.8MN | 191,201years | 5.88E+5kg |
| 12 | 4 | 49.1km/s | 3.5MN | 1.96hours | 4.55E+5kg |