



Slider 1: rotates camera boom
Slider 2: zooms boom camera
* Important! Reverse Roll/Yaw inputs before driving off!
Also important! If you're using the Parallax mod, I highly recommend you set the terrain colliders so you can pass through all rocks. This little rover is too small and too fast to be crawling over rocks and it will break, even at relatively low speeds. *
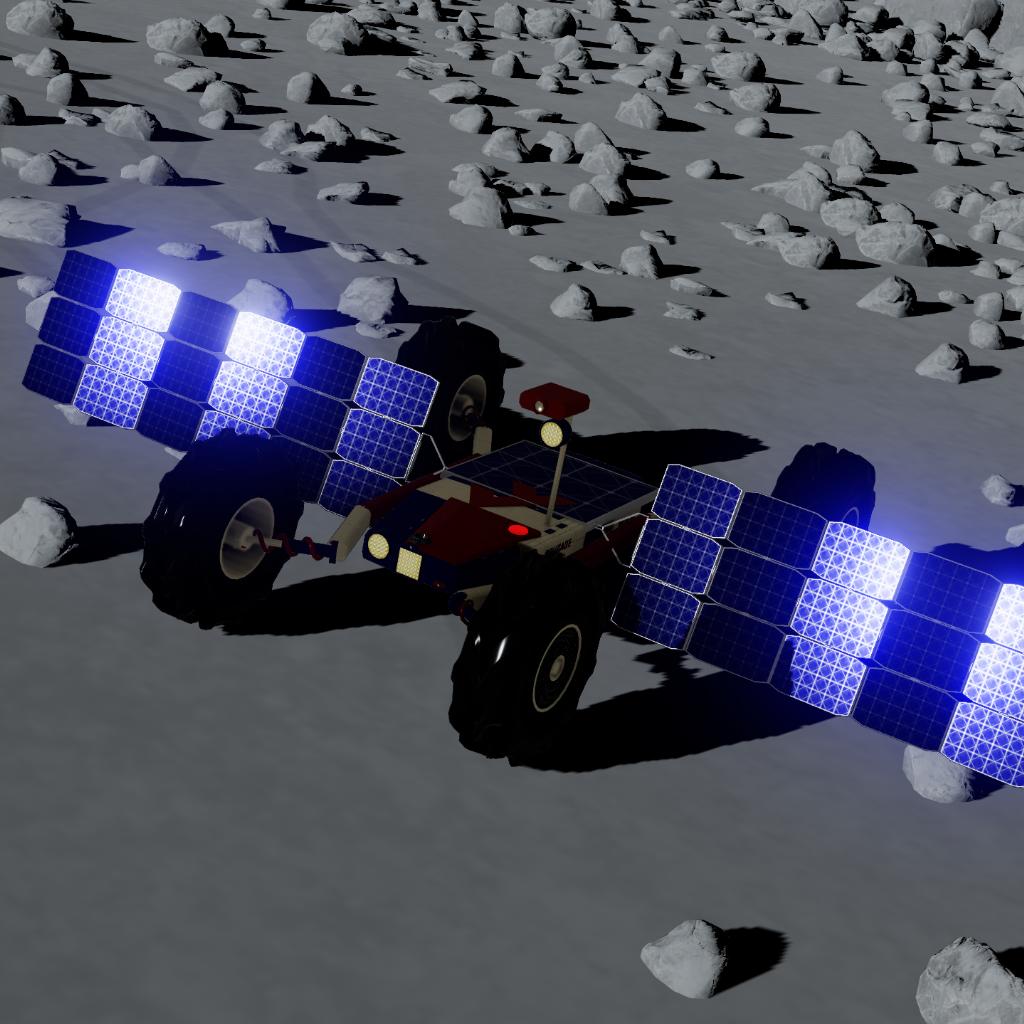
Courage Rover UL - the ultimate ultralight, high-speed exploration rover, suitable for all small planetary bodies.
I started designing this as a standard compact ultralight payload for missions across the Juno System. I designed this to get the "drive 1000 km" milestones, and I was tired of my rovers getting yeeted by invisible terrain noise, so it's fully drivable in either orientation - the throttle has been re-lerped so that it can go full speed in reverse (required when driving upside down). It's small enough to fit into tiny cargo bays, and light enough to be carried by surface shuttles. It's fully featured and doesn't cut any corners, and even carries a telephoto camera.
The Standard variant (this one) includes additional solar panels for self-sufficiency throughout the Juno System. The Dock variant (still in development) has a service boom-mounted 25% docking port in lieu of solar, for docking with Aurora Aerospace base modules or surface shuttles for recharge/refuel.
Features
- Fully Career Mode compatible (no tinkering)
- 29 m/s design speed - Throttle: 0-45 reverse, 45-55 neutral, 55-100 forward
- Fully reversible and drivable in either up or down orientation
- Gyro stabilized - Lock Up if upside down, Lock Down if rightside up
- Computer assist features - emergency throttle down and brake (AG2), automatic brake assist during excessive spin
- RCS system (AG10), used to flip the rover over if upside down, although you can also just drive upside down until you hit a rock and flip back over
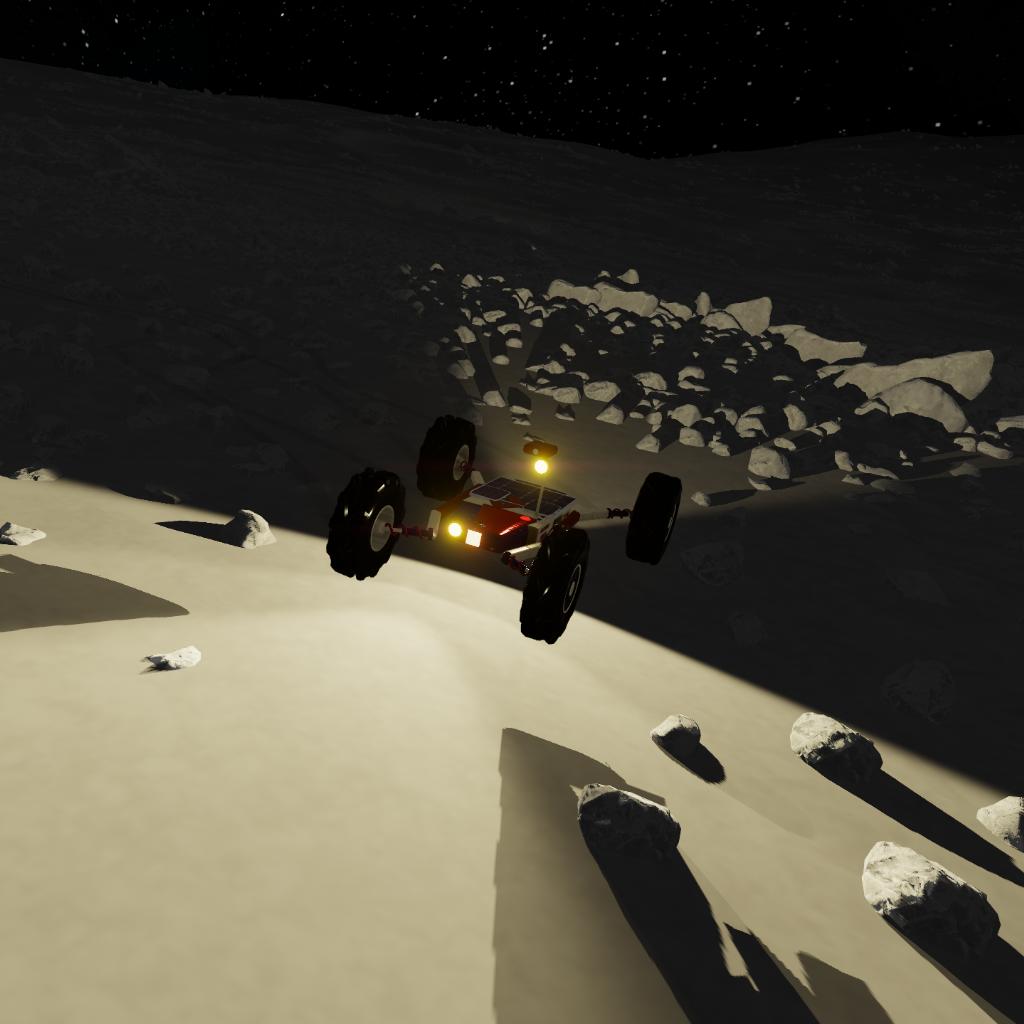
- Boom-mounted zoom camera (40 - 120 field of view), bow-mounted driving and low-light cameras
- Fore and aft wide angle driving lights, forward high intensity spotlight, and boom mounted floodlight
- Main and deployable solar panels (Courage UL Standard), or service boom-mounted docking port for recharging/refueling from Aurora Aerospace modular base structures or surface shuttle (Courage UL Dock)
Usage notes:
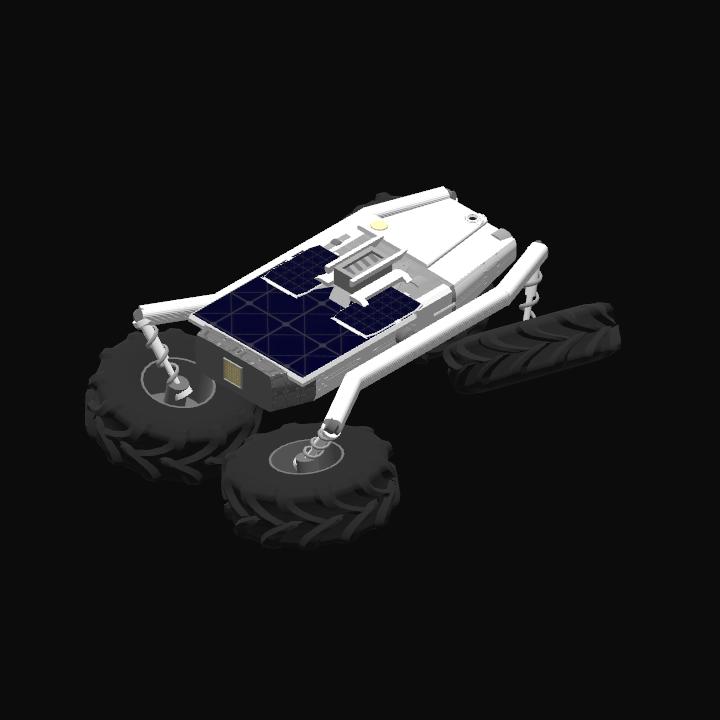
- If you make this a sub-assembly, it will reset the default pilot orientation and the gyro will not work correctly. You MUST verify that the pilot orientation is as shown in the picture (face down, head towards the back) before attaching the rover to your rocket. I know this is weird, but the autopilot won't control 3-axis stability in plane mode.
- If you want the Vizzy program to work (AG2 Emergency Brake and auto-brake when excessive spin is detected), you MUST turn on the rover's command disc and make it the active command pod before saving and exiting to the main menu, or the Vizzy program won't turn on when you reload the craft. I recommend you do this on the launchpad before you take off, but you can do it at any point before the first Save and Exit. Don't forget to turn the rover's command disc off afterwards to avoid any issues with the launch vehicle.
- You can repack/stow the rover at any time, however it's highly recommended that the brake NOT be set while packing/unpacking or the wheels may pop off.
Dimensions (deployed): 113cm width, 141cm length, 39cm height
Dimensions (stowed): 84cm width, 112cm length, 44cm height
Empty weight: 123 kg
Curb weight: 128 kg
Launch weight (incl. interstage): 134 kg
GENERAL INFO
- Created On: Windows
- Game Version: 1.2.109.0
- Price: $31k
- Number of Parts: 50
- Dimensions: 0 m x 1 m x 1 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 134kg
- Dry Mass: 129kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|



bro 6 flips the rover