
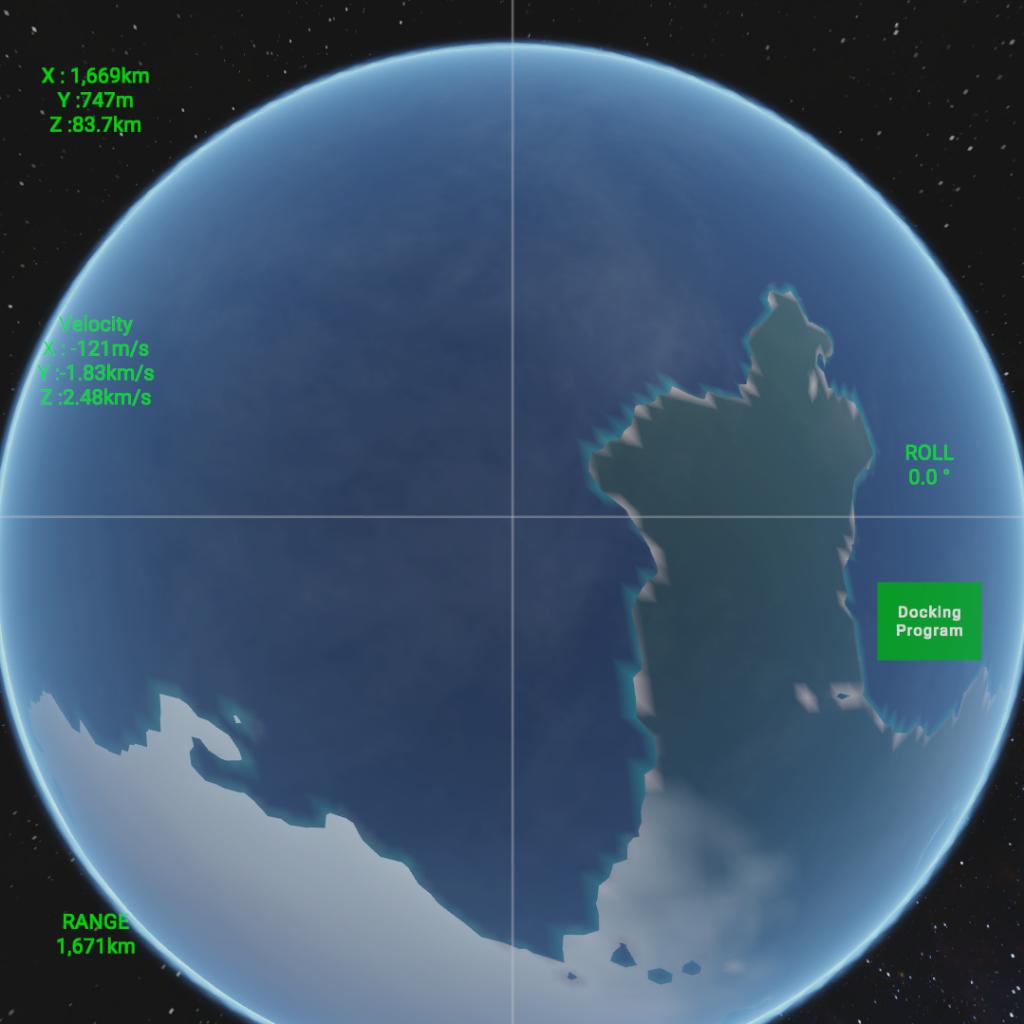


AG1 to activate docking HUD.
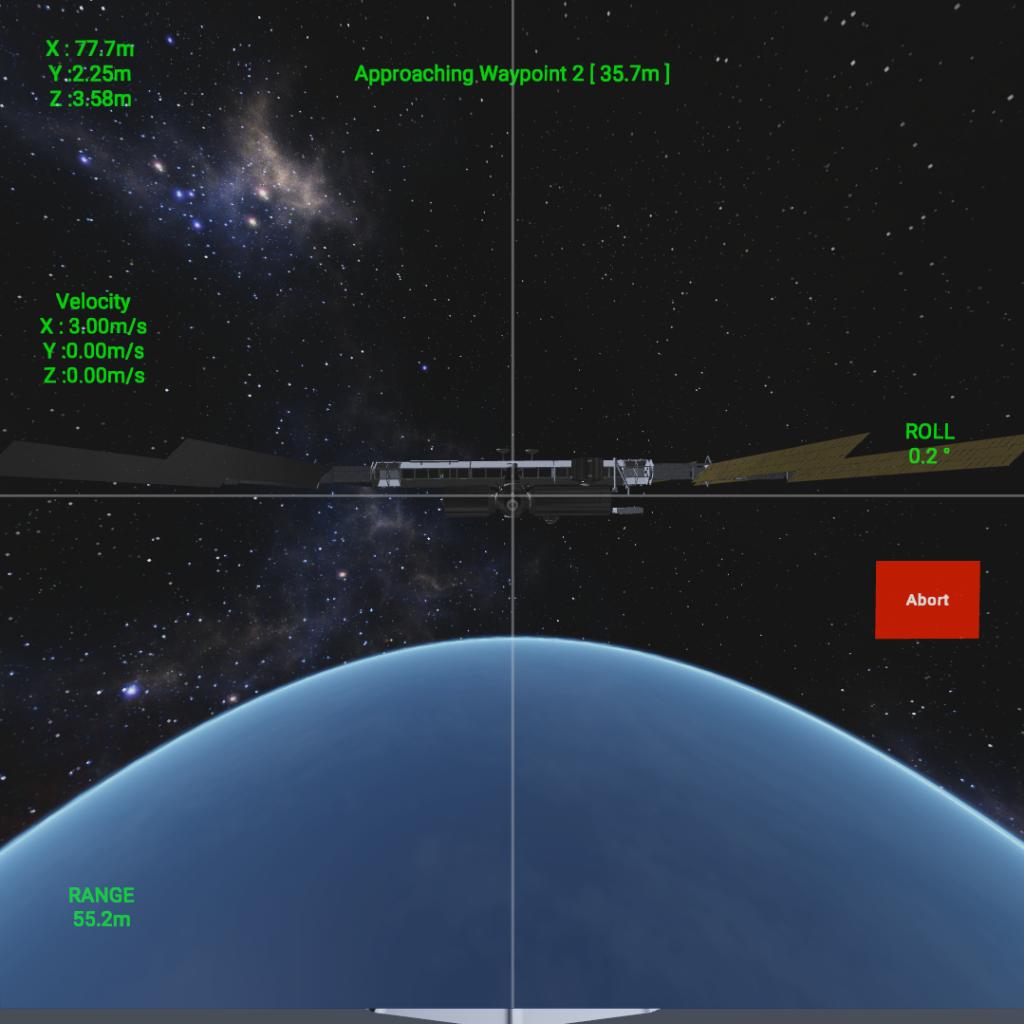
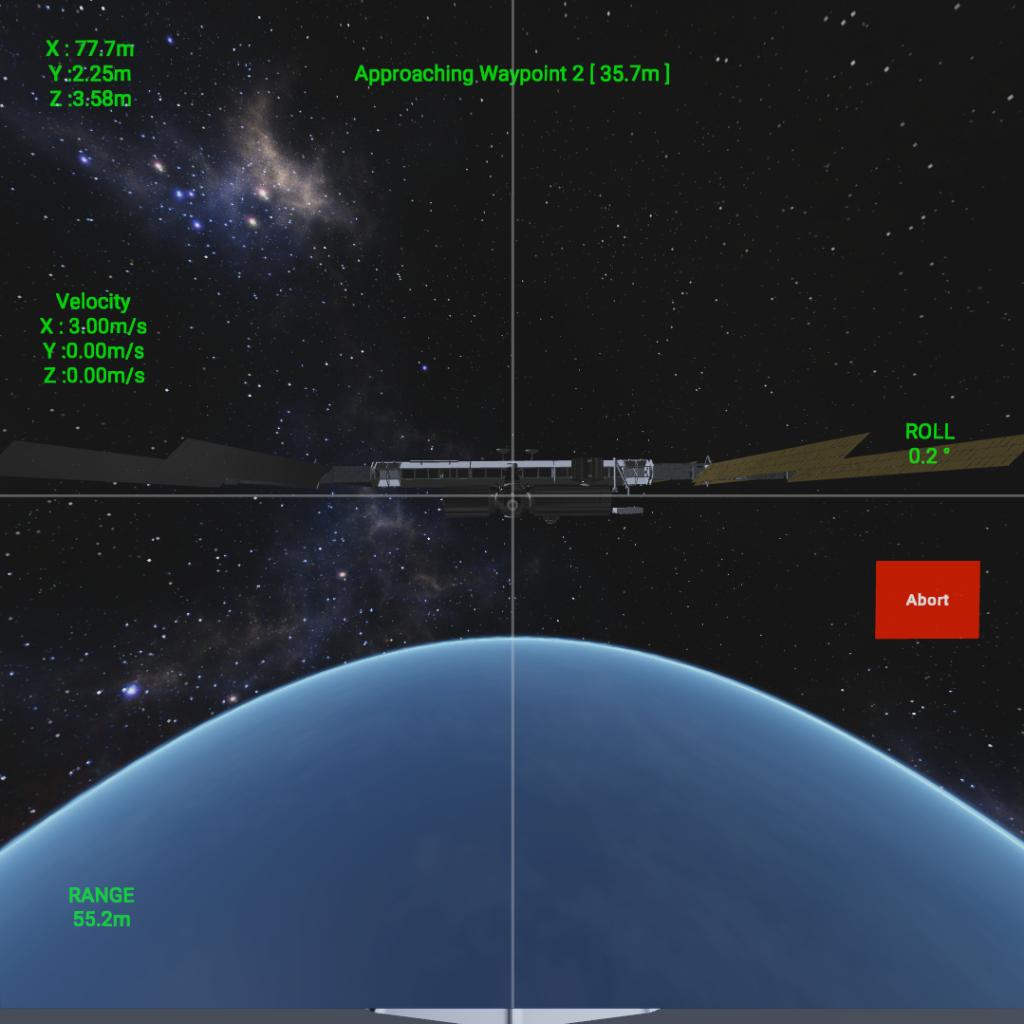
To use the docking program, select a target craft (<5km) and click [Docking Program] to activate auto docking. Select target docking port by name or number as listed. Click [Abort] to cancel.
Waypoint 1 is about 220 meter from target, waypoint 2 is about 20 meter from target.
You can dock manually without using the docking script too.
To use this on other craft, add the docking port assembly on command pod to custom assembly, copy the broadcast program inside the command disc and modify the part name in the program.
MFD custom instruction by Hannah1212
MFD tools v0.1 BETA
GENERAL INFO
- Created On: Windows
- Game Version: 1.1.109.0
- Price: $2,806k
- Number of Parts: 22
- Dimensions: 3 m x 2 m x 2 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 300N
- Engines: 1
- Wet Mass: 9,152kg
- Dry Mass: 6,333kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|
Comments
17 Upvotes
Log in in to upvote this post.
@Cjkb any problem?
@llwei97 just wondering if you could help? Every time I’m using this now I get that the craft must be within 5 km even if I put the craft 500m from it, any ideas? Thanks for your help
@llwei97 @ilwei97 just run into a slight Jessie with this vizzy. Works on every craft apart from Apollo csm that I have. It just seems to fire recs and circles the target getting further away. No matter what cam I have it does the same . Any ideas?
@IMULAerospaceIndustries No, it work on regular docking port. you can find me on JNO discord server (wei2774) and send me your craft for me to check.
I believe the problem is in the block of code starting with “On start, set variable DockingStatus to false, set variable StatusDisplay” in the bottom middle of the Vizzy editor. It could be the program itself or just the craft I’m using it with, but it always sets waypoint 1 to 1,774 kilometers away. Does the program check to see if the target craft has these smart docking ports on them or not?
So I found the issue with the docking port names, and I’ve gotten it entirely fixed. I just forgot to name the ports in the data list with Vizzy, but now I’m having a new problem. Whenever the program activates it says the first waypoint is 1,774 kilometers away. Idk what to do about that, I have no clue how Vizzy works.
@IMULAerospaceIndustries not sure what happened there. Regular docking port work as long as you edit the docking port name in the list and edit the (partname - part name) vector in docking port position and docking port part vector. You need to have some basic in vector.
@Cjkb maybe its because you increase the distance requirement, i cant be sure as i dont know the state of your target craft.
@IMULAerospaceIndustries @IMULAerospaceIndustries hi there I’ve sussed it out for me. Use the docking ports from the download craft and create them as subassemblies then add those to your target craft. If you need any more info I’ll be happy to help
@llwei97 perfect thanks. I’ve managed to get it to close on the target now thanks to your help however it approaches the target at an angle now. Very confusing. Any ideas on this? Thanks again
@llwei97 I don’t know what segment of code to change. I tried making a single block on the target craft that sets part 609 (the docking port I’m trying to get to) to “Airlock” but whenever I get in a new craft, target the target, get within 5km, and activate the HUD, the docking program pop up is complete blank and gets stuck in an infinite loop of opening the window every time I close it. What exactly do I do here? If it helps, the target craft doesn’t have any of these fancy docking ports, just regular ones. The craft I’m using has one of these.
@IMULAerospaceIndustries make sure you change the part name in the vizzy code in the command module
Can I change the name of the docking port and have it still work?
@Cjkb oh the docking program is in mfd (forgot the part name). On top of space capsule
@llwei97 thanks again for your help. I might try and tweak it. I’ve looked at your vizzy script on the command disc but can’t see anywhere to change the value. Is this the only place that there is a vizzy flight program? I hope that makes sense. Thanks again
@Cjkb the easiest way is to change the condition (like<0.5) it wont be very accurate if your target orientation is not fix. As long as your target is not lock on prograde or vector that keep changes when orbit, it should be fine. If the target docking port keep changing orientation, you have to "catch up" with it, much harder to meet the condition which is 0.25m when your distance to target is larger.
@llwei97 thanks for your reply. You know what I’m not 100% sure. I launched the target intro orbit then launched the second shortly after. The target vehicle did have an auto orbit vizzy so maybe it was locked on current heading? What should the target vehicle be set too? Thanks again
@Cjkb its because i set it to reach 0.25m from waypoint to proceed. Does your target has fix orientation? Or orientation keep changes (like lock on prograde)
@llwei97 this is a great fizzy and works with the default craft. When I upload it as per the instructions to my own craft all goes well up until reaching waypoint 1 and it stops at around 0.30m from waypoint 1. Any ideas?
Thanks
@llwei97 thats used To move modules on the mir space station its a robotic arm
@Soyuzfairings500 no
You know how To do lyappa arm?
@ llwei97
I checked it, this is REALLY good work! Congratulation ! Tom
Great Job. "I have to have one of these".
this is completely insane