
Auto Credit Based on reCarn's [CSS] Robotic Arm Service Hub + Dock Adapter Module
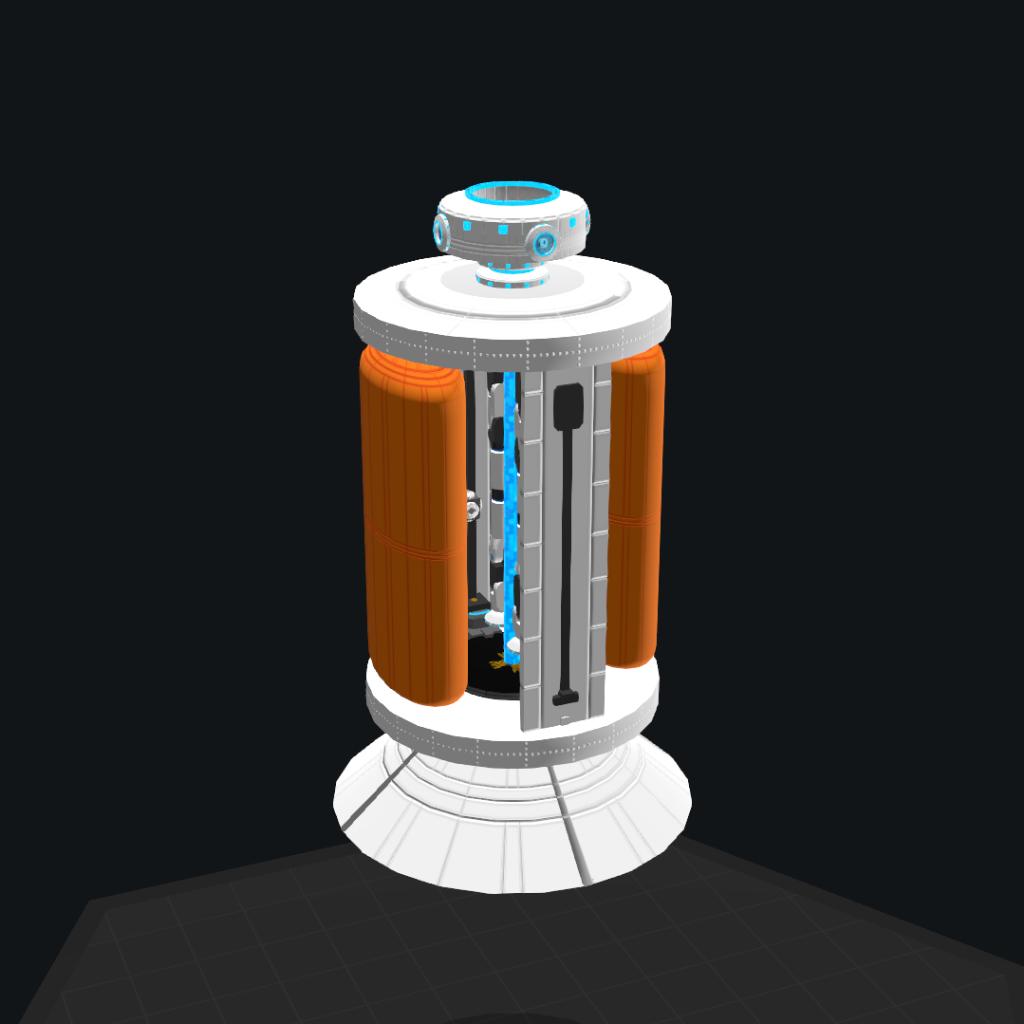
This is the R.A.S.H module with 2 robotic arms for module dock assist and future CSS expansion projects. Comes with a Dock Adapter Module for use with robot end-effector part.
Controls:
AG 1-2 activates corresponding robotic arm
Throttle unpacks robotic arm
Pitch/Yaw for general arm movement
Slider 1 for arm roll
Translation Controls for wrist movement
Slider 2 for arm extension
Notice:
Unpack arms only after docking to satellite for stability.
GENERAL INFO
- Predecessor: [CSS] Robotic Arm Service Hub + Dock Adapter Module
- Created On: Windows
- Game Version: 0.7.0.5
- Price: $2,215k
- Number of Parts: 124
- Dimensions: 7 m x 4 m x 4 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 20,845kg
- Dry Mass: 7,081kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|
4 Comments
- Log in to leave a comment
-
-
766 reCarn+1 5.9 years ago
@McDuetchVan it's sensitive and should be docked to a station first before stability becomes usable, otherwise you get noodle arms. Just give gentle nudges since it responds better to incremental button taps and was tested that way.
-

4 Upvotes
Log in in to upvote this post.
@reCarn so good !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!