




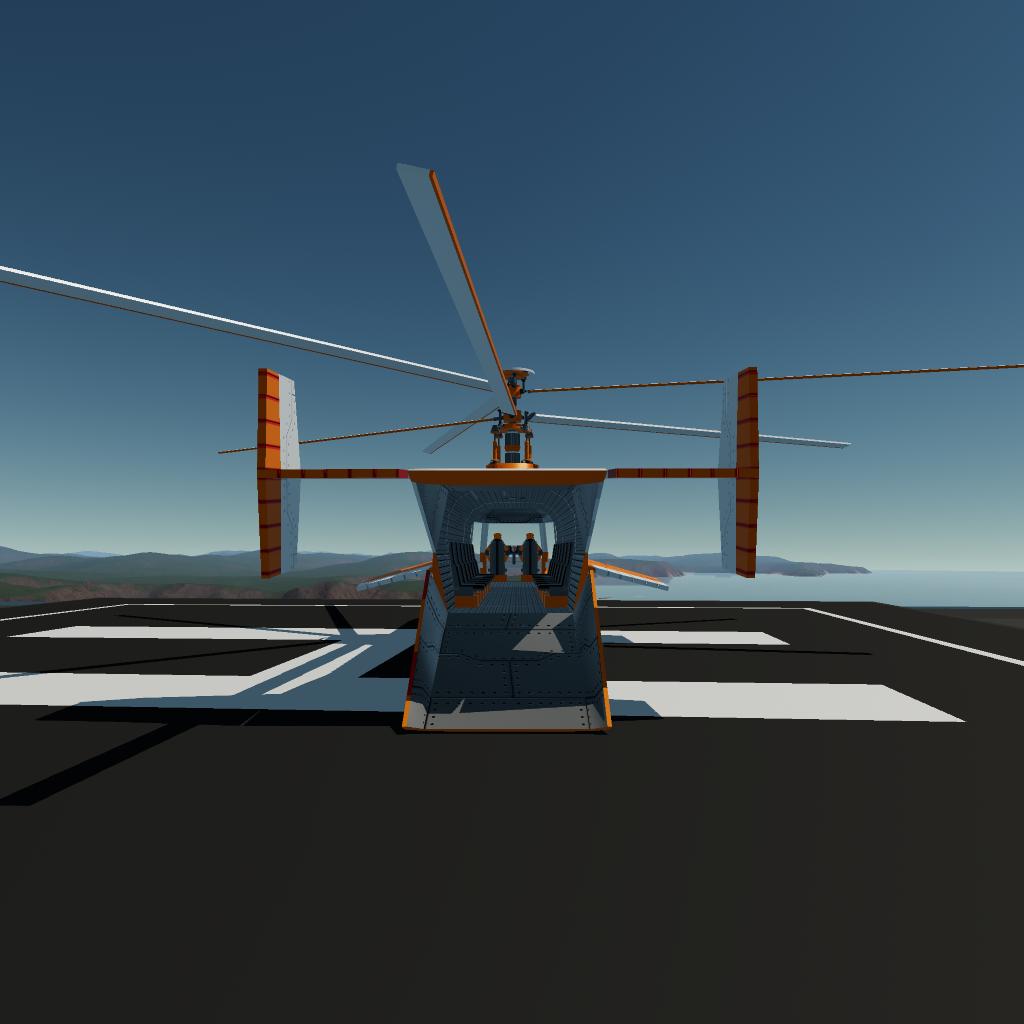
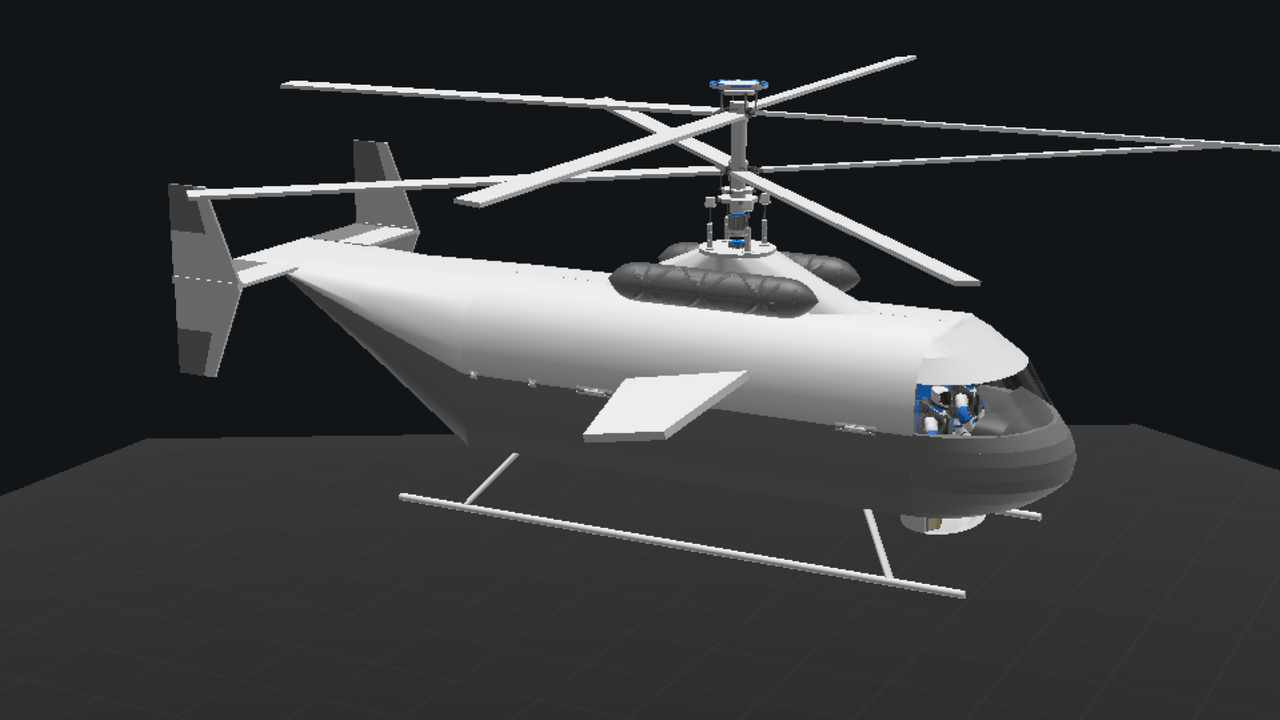
This helicopter has its two rotors in a kamov style “one on top of the other” configuration.
I tried to keep it relatively simple so instead of using pistons for the collective I used control surfaces. I also connected the top inverted swashplate to the lower pistons so it only needs one group of pistons.
Controls are simple;
AG1 = Engine
Throttle = Collective(up/down)
Throttle:
/\ ascend
50% hover
\/ descend
Throttle at =50% is more or less holding altitude.(depends on air density)
You don’t need extreme input, 55% is enough for a slow steady climb from the launchpad, and 45% is enough for a a slow descend that gives you enough time for corrections.
There is no yaw control, but it is pretty easy getting used to that since it stabilizes itself due to the tail.
The wings are asymetrical, trimmed for forward flight at throttle 60% at a speed of around 50 to 60 m/s. You only need minimal input to keep it on course at this speed.
Not really neccesary but for additional trim at other speeds slider 1 trims roll and slider 2 trims pitch.
Lastly, it is advised to be gentle around speeds over 40 m/s, aggresive maneuvers might put to much G on the rotors and snap them off.
GENERAL INFO
- Created On: iOS
- Game Version: 0.9.918.1
- Price: $12,327k
- Number of Parts: 181
- Dimensions: 6 m x 21 m x 19 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 600N
- Engines: 2
- Wet Mass: 8,850kg
- Dry Mass: 8,838kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|


15 Comments
- Log in to leave a comment
-
4,914 sacr3dbac0n0+1 2.9 years ago
@TritonAerospace This is incorrect. You can have multiple inputs on a single rotator/motor/hinge. All you do is type in + or - for whatever input you want to couple. For this case, to get yaw control all you have to do is type AG1-Yaw for the lower motor and AG1+Yaw for the upper motor.
-
-
6,946 FunkPunk+1 3.2 years ago
@TritonAerospace Thanks! It indeed works wonderfully! Great instructions!
Aah I had the same problem with mine, it also pulls to the side slightly and I could not find the cause. It’s very strange because everything is made with symmetry… It is also the reason the right wing has a greater aoa than the left.
The problem lies in my design somewhere but hard to pinpoint. The simplest solution is to build a single rotor swashplate and engine, mirror the whole thing and offset it above the other. It takes more space and parts but has no strange phantom forces.Thanks, I see reverse engineering as a great compliment!
-
12.4k TritonAerospace+1 3.2 years ago
@FunkPunk this thing flies really really stable and I've been reverse engineering your swashplate but no matter how perfect i copy and improve upon your design it is never stable and it always pulls to the right I've started from scratch multiple times i guess I'm gonna use your plate 😩
-
12.4k TritonAerospace+1 3.2 years ago
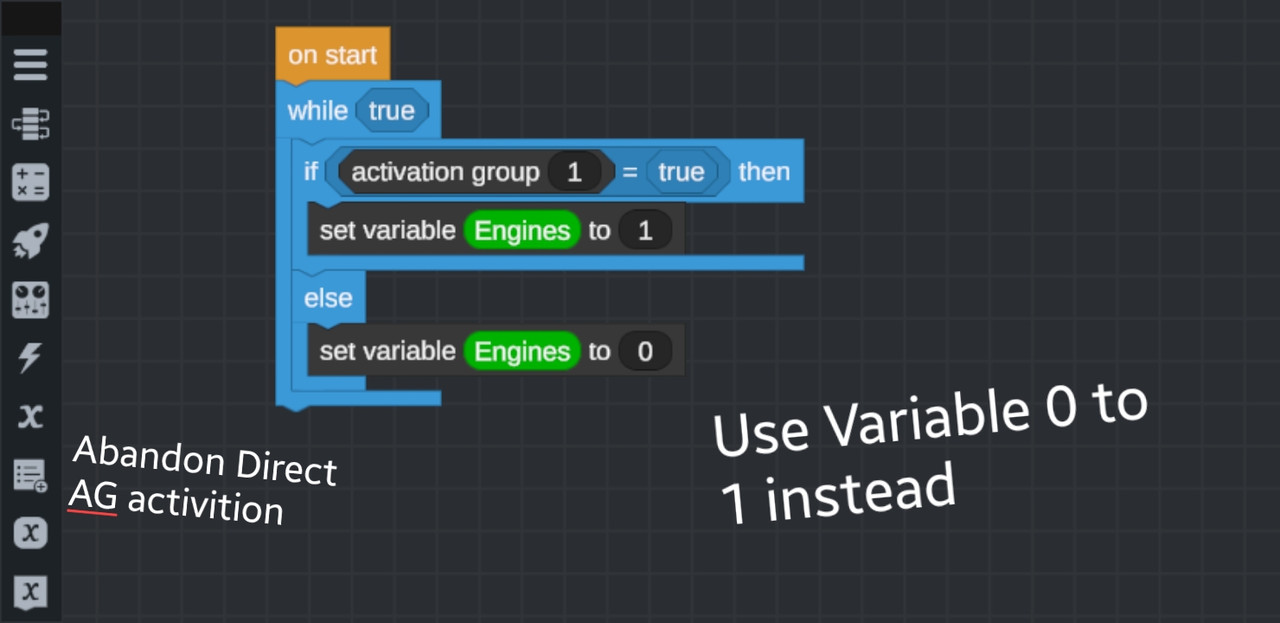
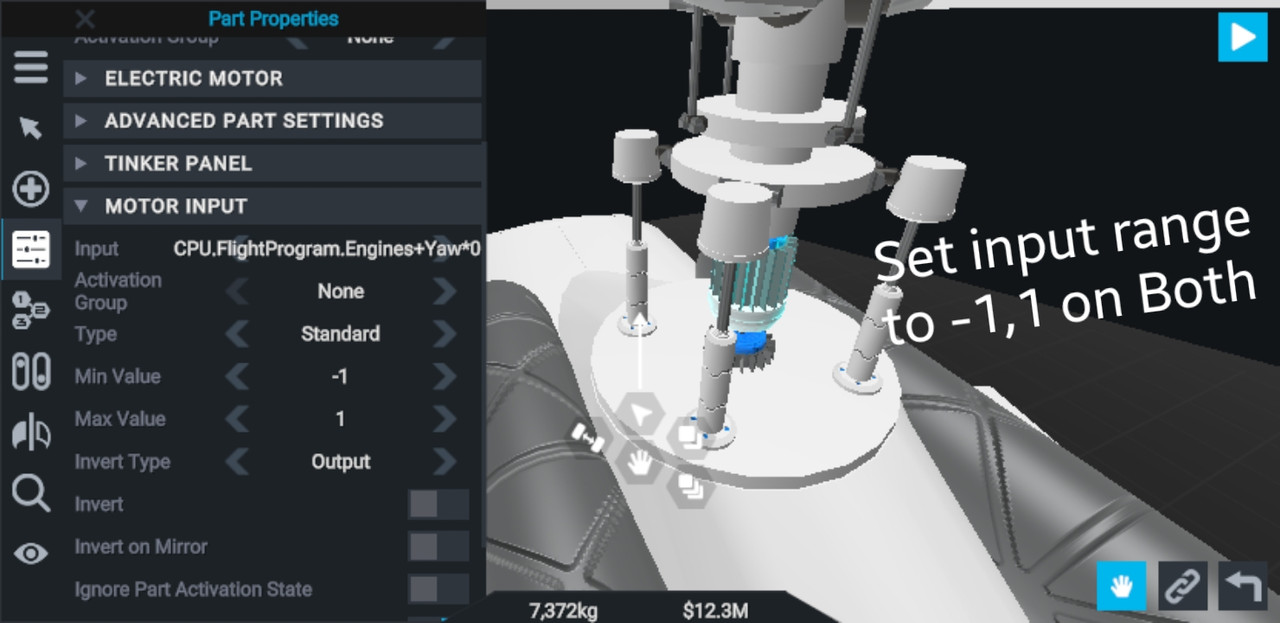
Ok first abandon the Direct AG engine input method since you can't add more inputs to it.
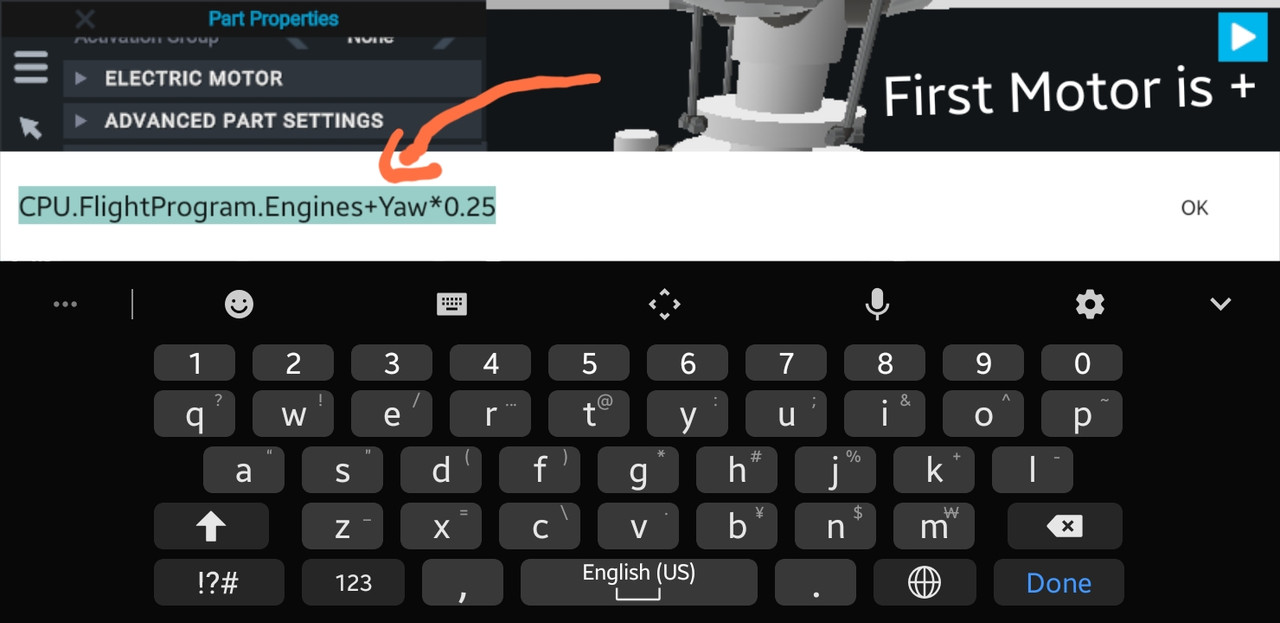
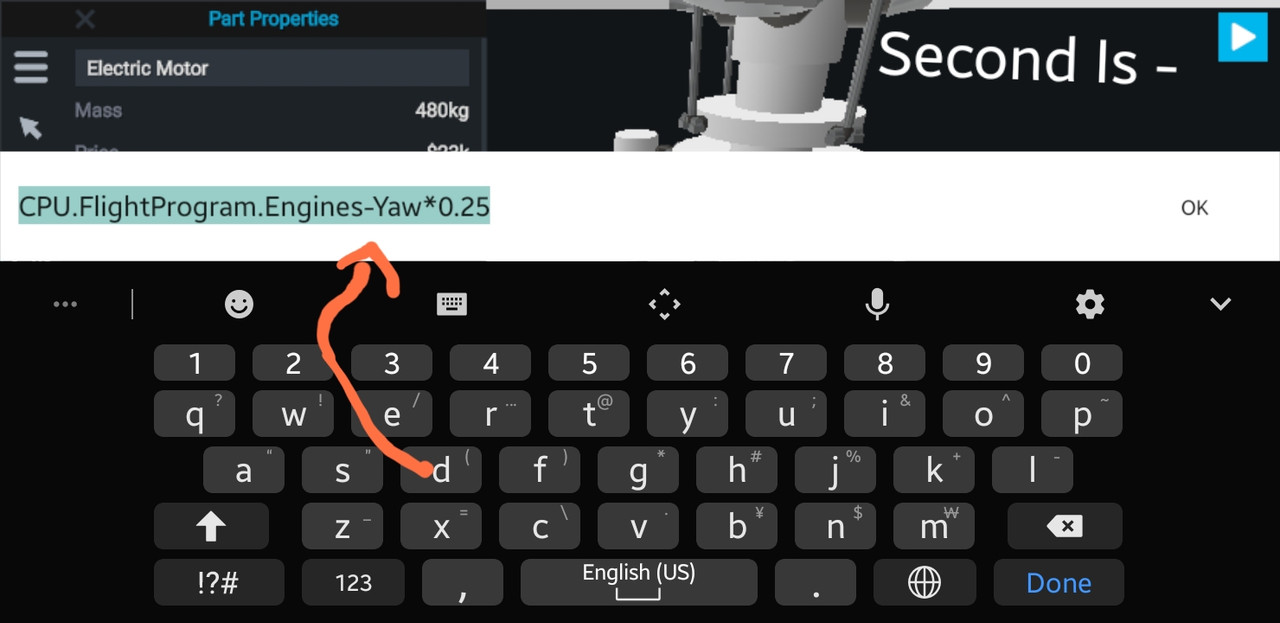
Simply create a vizzy variable and Code that into the motor input then you can add on the Yaw portion, after writing in the variable input add +Yaw×0.25 to upper motor (dont go above 0.25 or else if 1 it will make one rotor completely stop and the other to double the max rpm) then the opposite of that add -Yaw×0.25 to the lower motor,CPU.FlightProgram.Name
For example "CPU" is your command chip or command pod name or whatever is primary control name, and "Name" is the Vizzy variable you created you only need to change these two FlightProgram stay that way, then watch it perform.I can't stop reverse engineering your stuff though
-
-
6,946 FunkPunk3.2 years ago
@TritonAerospace I understand the what but I have trouble with the how. Where do I change what motor settings? I don’t know how I get the motor spinning with just the AG 1 AND have Yaw increase decrease motor speed. I know how to de either but not both. Could you explain exactly which settings need to be changed to what under MOTOR INPUT?
-
12.4k TritonAerospace+1 3.2 years ago
@FunkPunk you could eliminate the yaw problem by increasing one RPM and Decreasing the other since the electric motor will pass the limit of input1 if you input for example 1.5 it will force speed up i tried adding a + and -Yaw*0.25 at each motor and it work nicely
-
6,946 FunkPunk+1 3.3 years ago
@DreaPods yeah, that works, but it would result in control lag and loss of lift. Every yaw input you would need to speed up one rotor and slow down the other to compensate for lift. The problem is that it is easier to slow down the rotor than to speed it up and I had trouble figuring out how to bind it correctly to controls. I did some research into the Kamov Ka-50 because I could not figure out how it achieved yaw control, and it seems like it uses separate collective controls for that. So basically it increases the angle of attack of one rotor and decreases the other so it maintains the same level of lift overall but creates more drag for one rotor than the other so it starts to yaw. I tried to replicate this but I did not achieve as much control as I hoped. By that time I had so much time testing that I realized I didn’t really use yaw anyway so I just left it.
-
5,123 IcEStaR3.3 years ago
Great, but there is not enough yaw, maybe it can be realized through the difference in the RPS of the two engines
-
-
-
-







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
@sacr3dbac0n0 its all the same.
i tested it before i made my technique it didnt work now seems to work