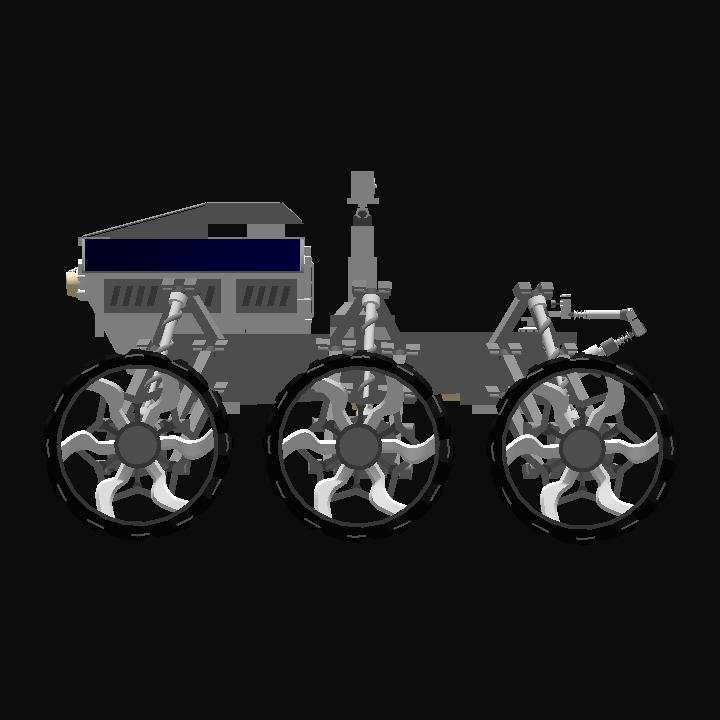
It is primarily designed for exploration with over 4 different types of exploration system built in.
FULLY AUTOMATIC
(IT TOOK ME 2 MONTHs TO WRITE THE VIZZY)
FEATURES - (can be accessed using activation groups)
1) Robotic arm --
a built in retractable robot arm which is capable of collecting different samples .
2) Auto-pilot --
Includes 2 options :--
i) Auto-Target --
a menu will pop-up requesting the user to input name of any terrestrial craft or structure on current planet .After entering the name ,the rover will automatically travel to the craft or structure.
ii) Auto-Roam --
the rover will automatically travel to a random location (within the radius of 500m) and use the robotic arm for exploration .The cycle will repeat until the activation group is turned off.
3) Landmark System --
A very unique system created to access previously visited locations.
Three options are included :--
i) Set-Landmark --
Just click on set-landmark activation group , to set the rovers current location as a landmark.A landmark number will be provided.
ii)Name Landmark --
name landmark activation group will open a popup menu requesting user to enter the landmark to be named and then type the name of landmark.
iii) Auto-Landmark --
a popup menu will request the user to enter either lamdmark name or landmark number of the landmark which is to be revisited.The rover will automatically travel to the entered landmark. This system can be very useful while exploration on luna or cylero.
Additional features :-
Max speed :- Rover will travel with not more then 15 m/s.(max speed can be changed in vizzy)
Current status:- A bar on the top will display the current state of robotic arm ,type of mode turned on ,and rovers mobility.Also additional information regarding the time to reach the landmark,target or exploration site.
Cameras:- Cameras are present on the head of rover and also on robotic arm.
Auto-Brake:- Instead of directly braking to 1.Rover will brake on a scale depending on the current velocity resulting a smooth stop.
Maybe I will add a drone to the rover in the next version [Explo(rove)r 2.0]
Please give feedback in the comments :-)
GENERAL INFO
- Predecessor: perfecto
- Successors 1 craft(s)
- Created On: Android
- Game Version: 0.9.926.0
- Price: $2,073k
- Number of Parts: 298
- Dimensions: 3 m x 5 m x 5 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 6,258kg
- Dry Mass: 6,258kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|