
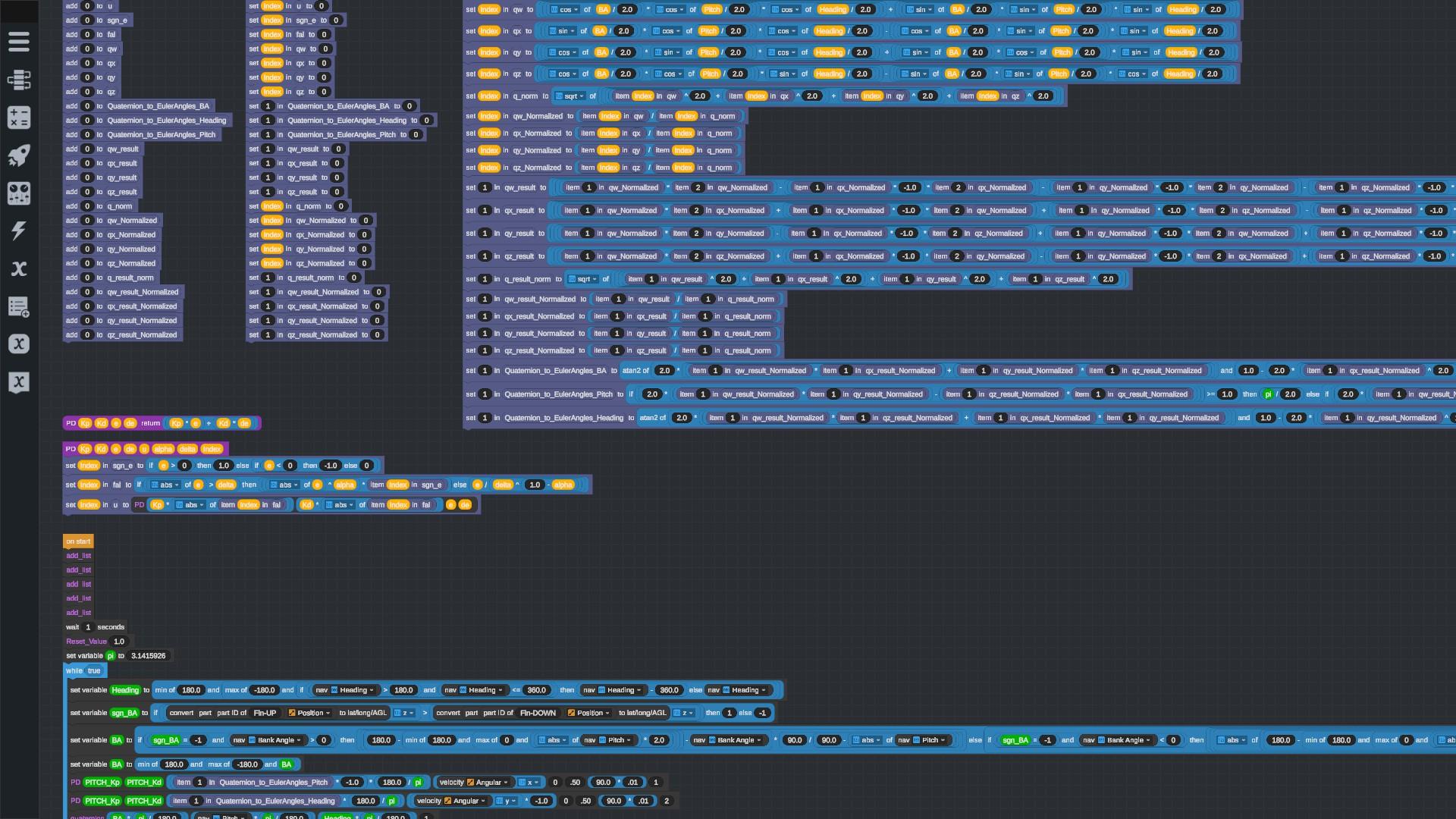
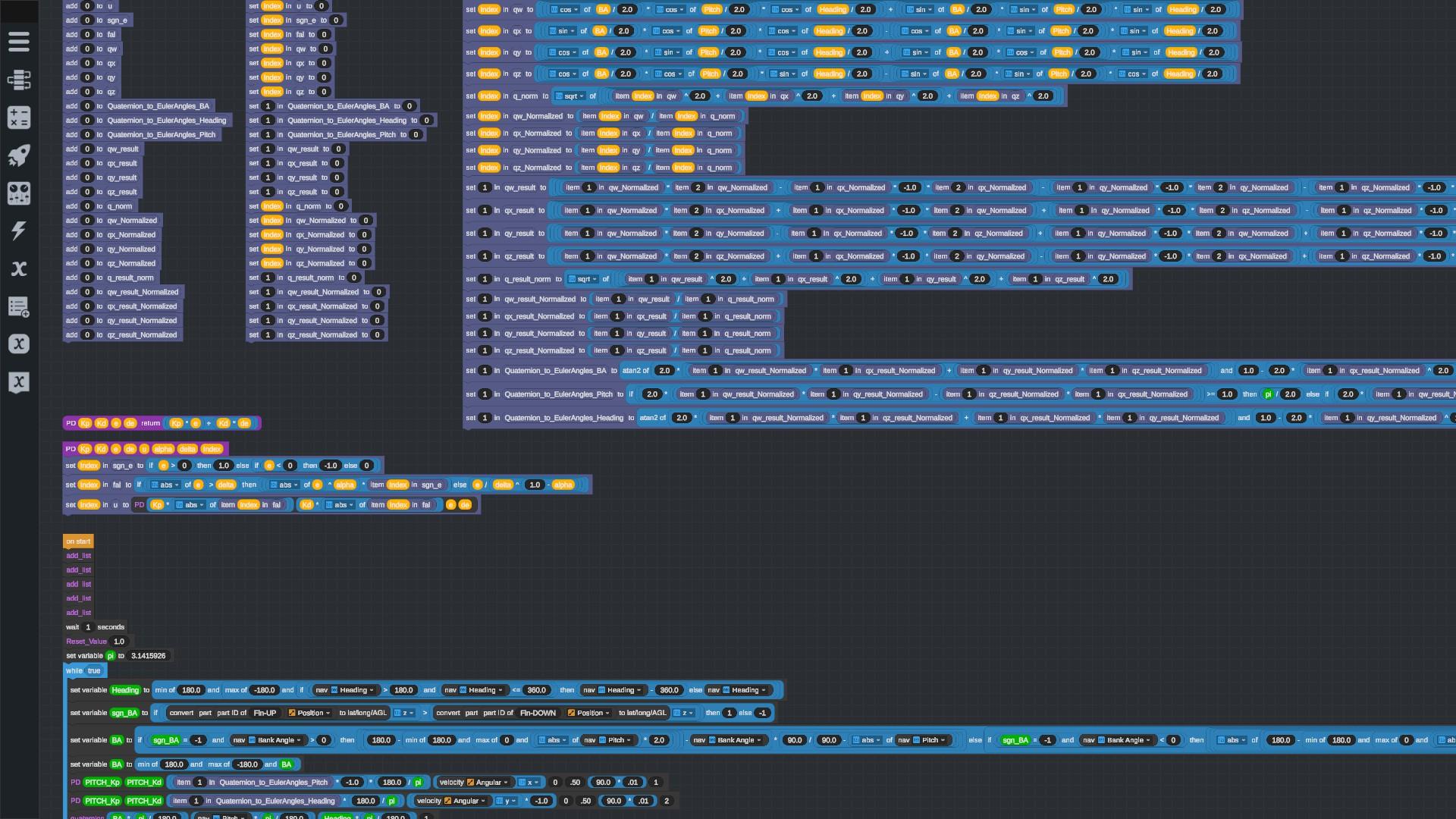
Before use, place a part on the south and north sides of the crafts, preferably a fin part. Name the south part UP and the north part DOWN (case-sensitive). Fill in the PID parameters in the program; otherwise, it won't function properly.
This program is for attitude calculation and is used to control the attitude. If you think the fal function's PID control algorithm is ineffective, replace it with the standard PID control algorithm.
The attitude calculation program can achieve smooth transitions, but in extreme cases (Pitch = ±90), it may lead to slight unsmoothness, which is not significant. Even in situations where the craft is spinning, it can still adjust its attitude.
GENERAL INFO
- Created On: Windows
- Game Version: 1.3.116.0
- Price: $0k
- Number of Parts: 3
- Dimensions: 0 m x 1 m x 1 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 2kg
- Dry Mass: 2kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|
No Comments
No Upvotes
Log in in to upvote this post.