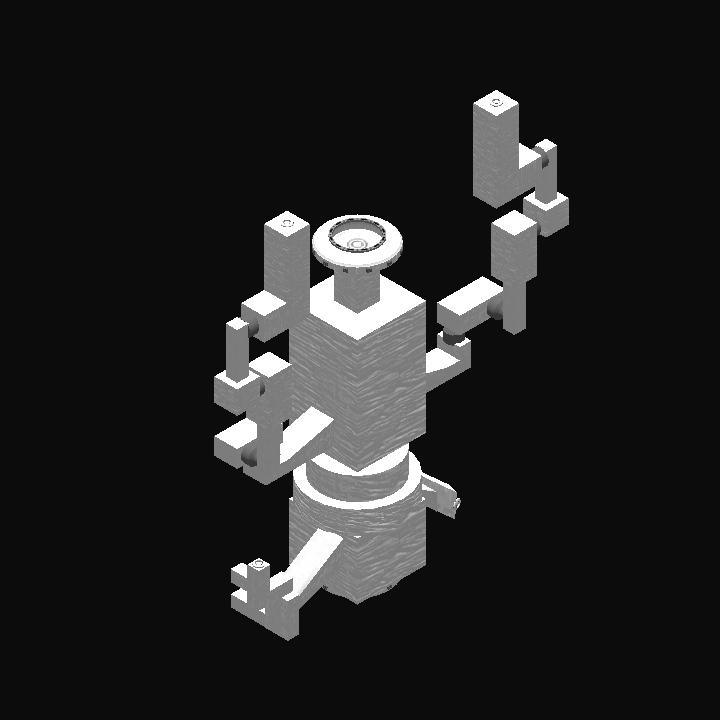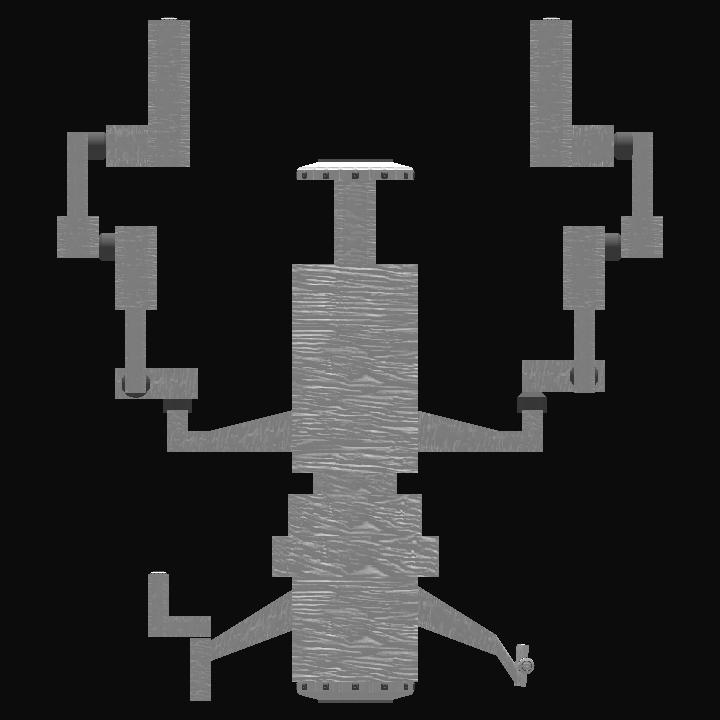
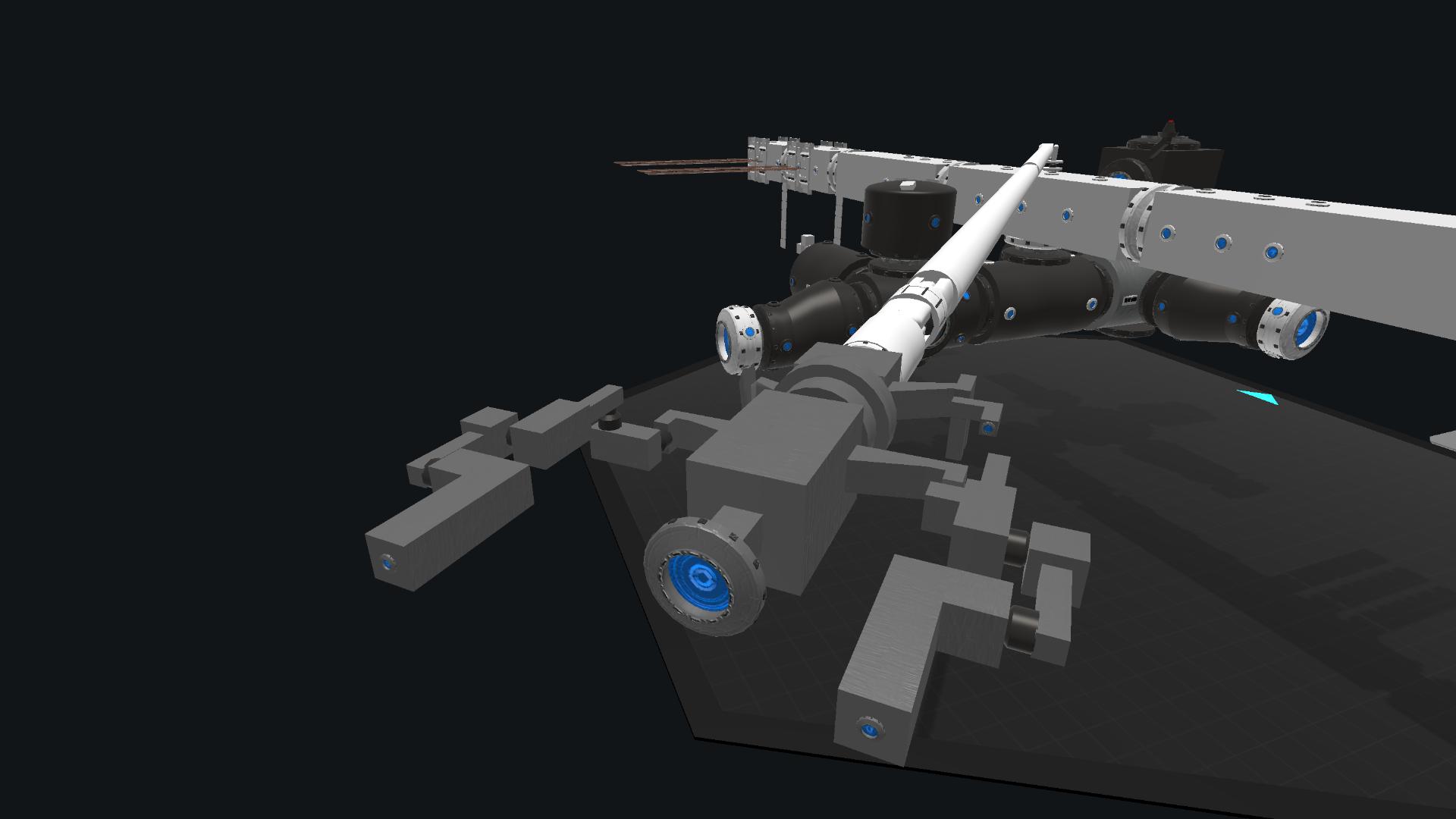
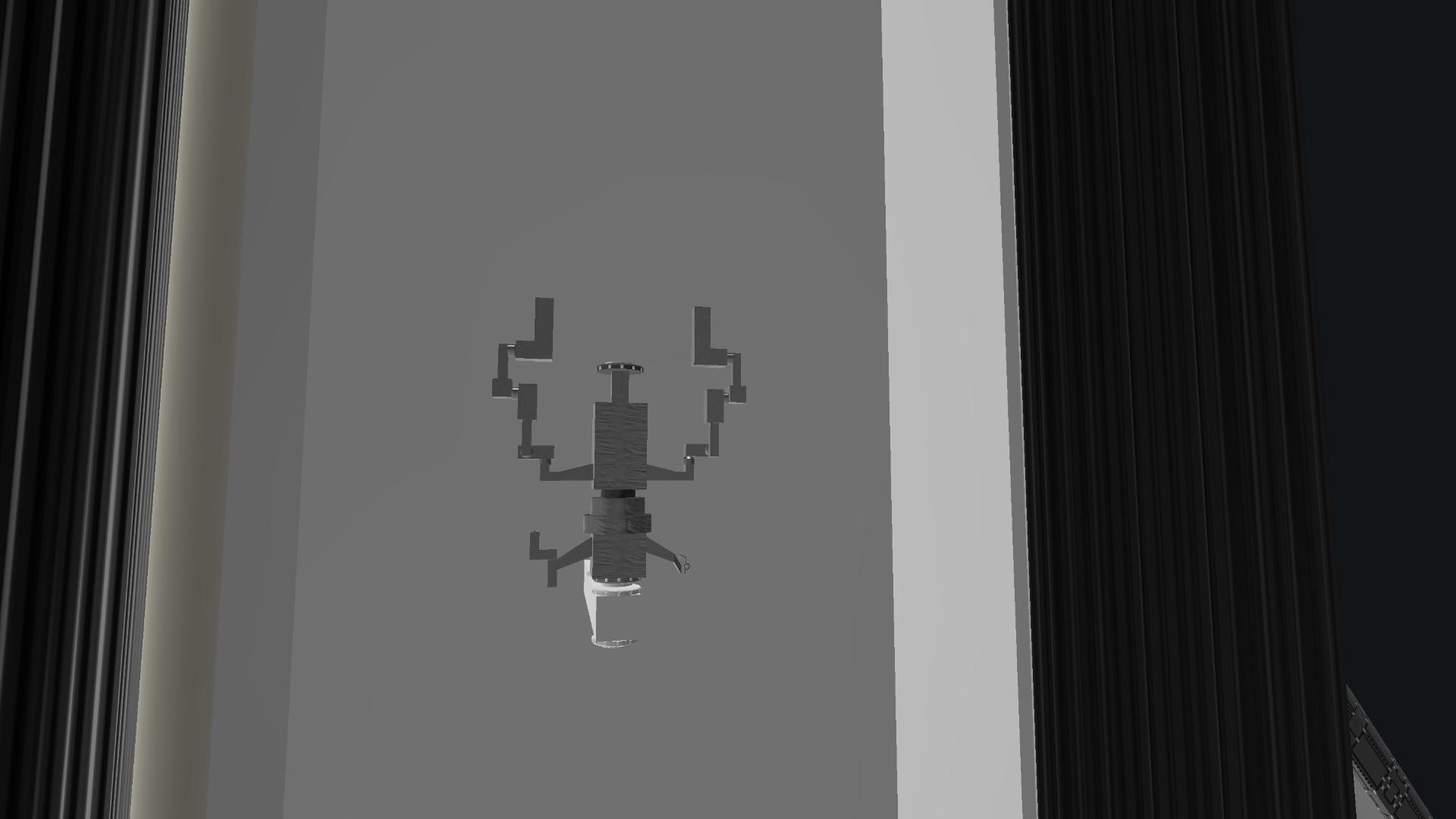

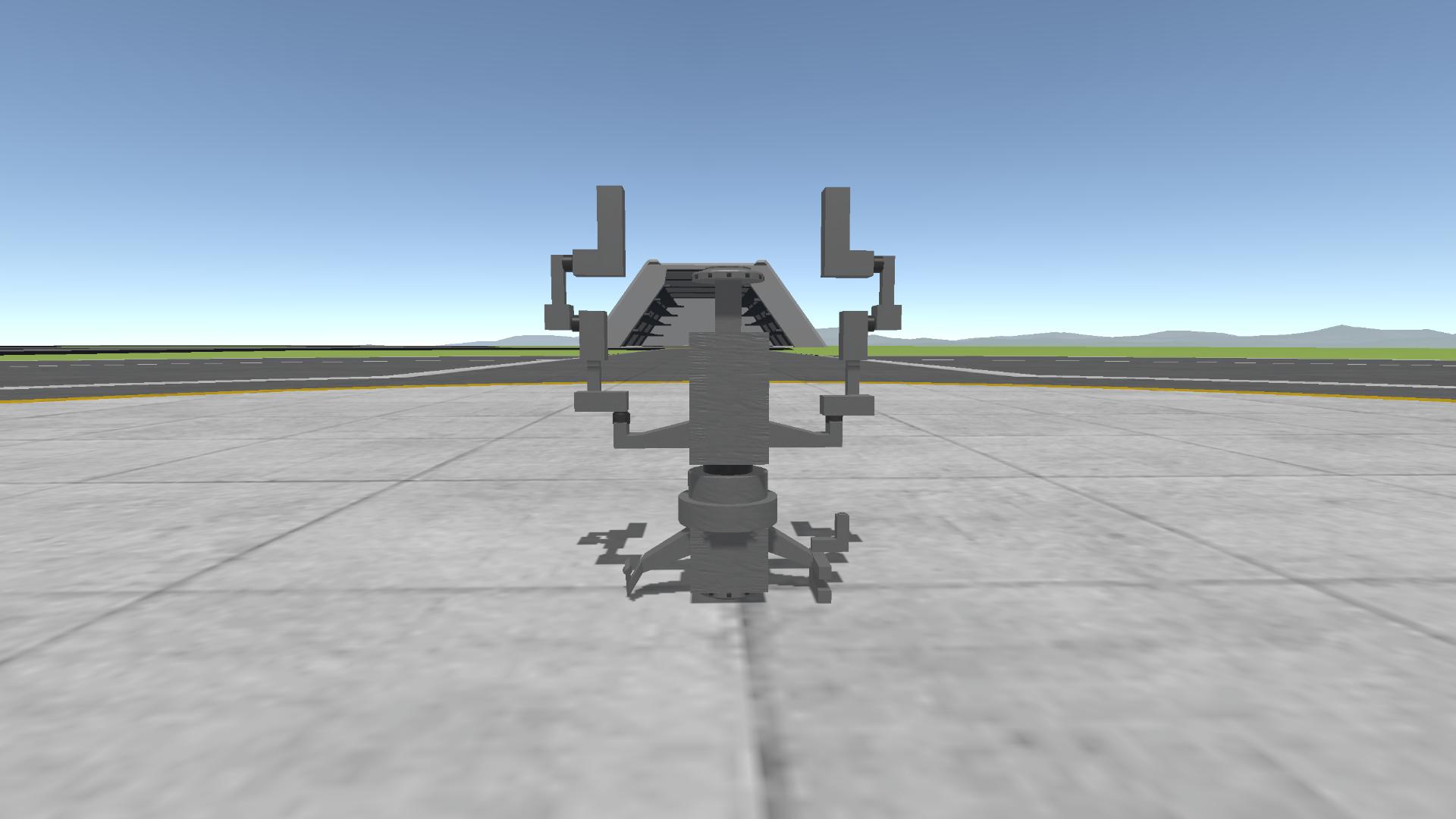
It is a Space Robot that repairs things on the ISS. It can also be carried by the Canadarm2 like on the second picture. It took me approximately 1 hour and 30 minutes to build the robot. It was the first robot I built. I didn't launch it to the ISS yet actually but I will exactly launch it. It was launched on STS-123 together with the ELM-PS. It has 2 leg-like parts for the arms to rest using docking ports. All the parts don't have symmetry because activation groups 1-8 will control only 1 joint and because of the different shapes of parts on one side and different parts on one side. There are 2 major docking ports for the grappling and for the ISS small docking ports and Canadarm2 and 4 very small docking ports for arm rest.
Activation Groups and Inputs:
Joint 1: Activation Group 1
Input: Slider 1
Joint 2: Activation Group 2
Input: Slider 1
Joint 3: Activation Group 3
Input: Slider 1
Joint 4: Activation Group 4
Input: Slider 1
Joint 5: Activation Group 5
Input: Slider 1
Joint 6: Activation Group 6
Input: Slider 1
Joint 7: Activation Group 7
Input: Slider 1
Joint 8: Activation Group 8
Input: Slider 1
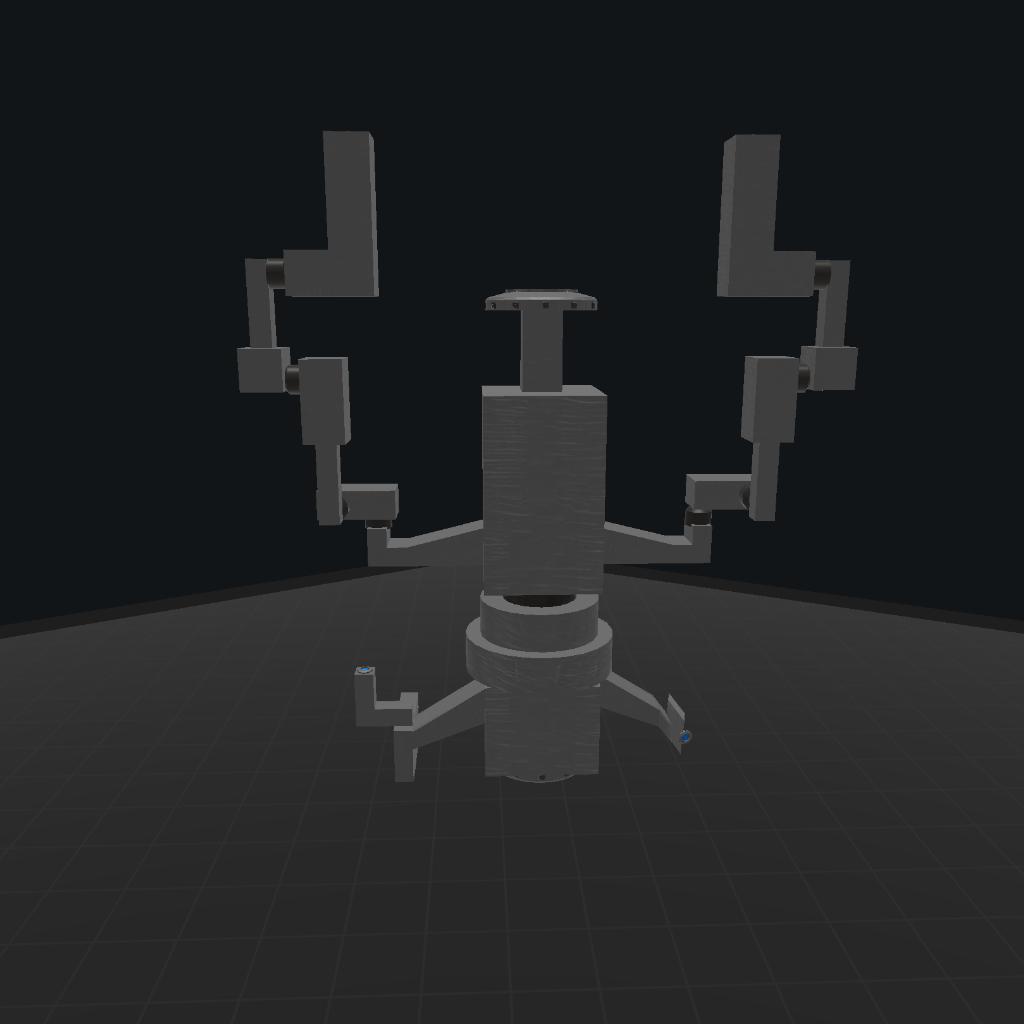
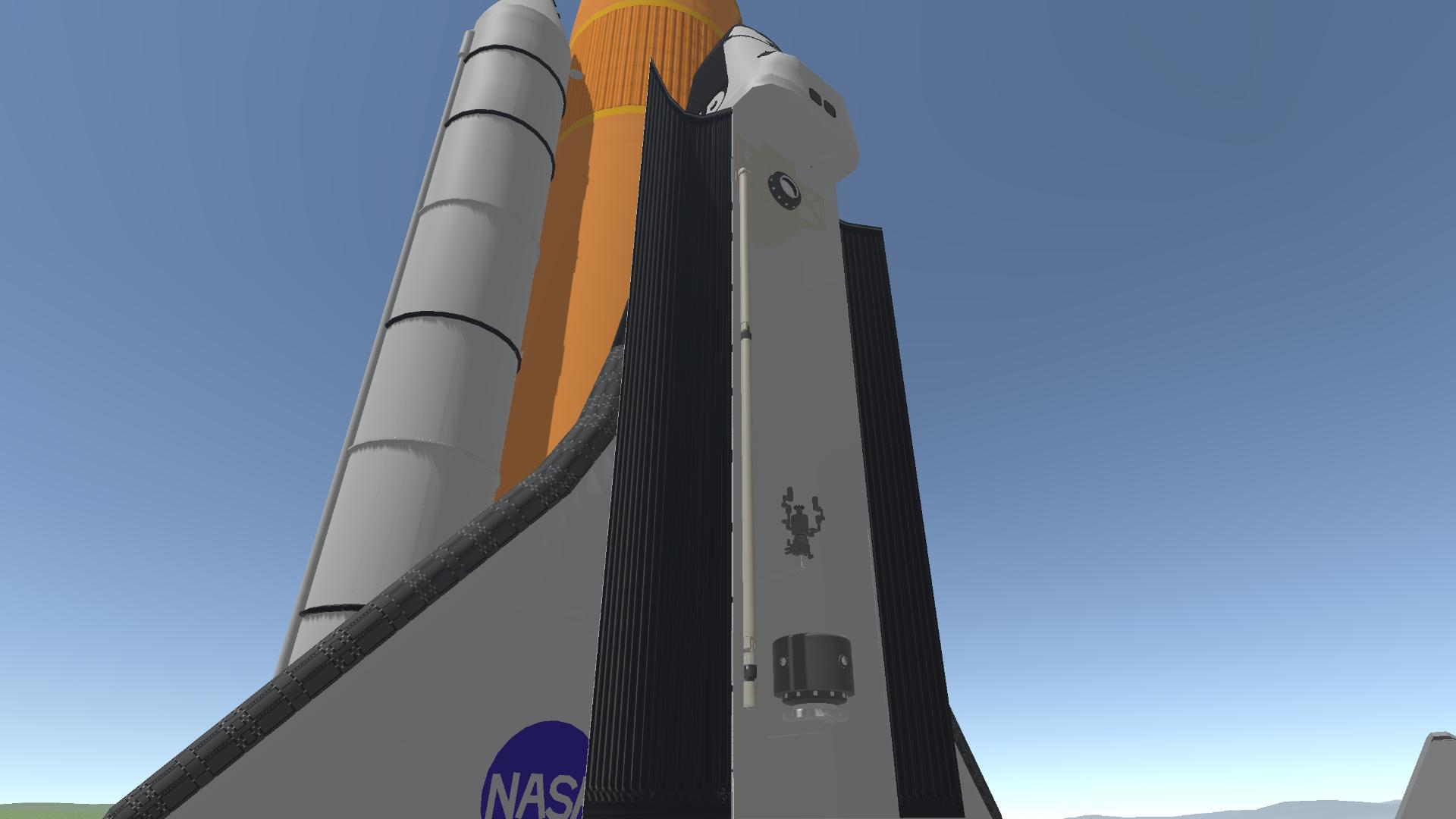
Save it as a subassembly. On the fifth picture, It shows Dextre connected to the ISS instead of the Canadarm2. It can also be connected to the ISS.
GENERAL INFO
- Created On: Android
- Game Version: 0.9.509.0
- Price: $592k
- Number of Parts: 50
- Dimensions: 3 m x 1 m x 3 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 3,589kg
- Dry Mass: 1,934kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|