



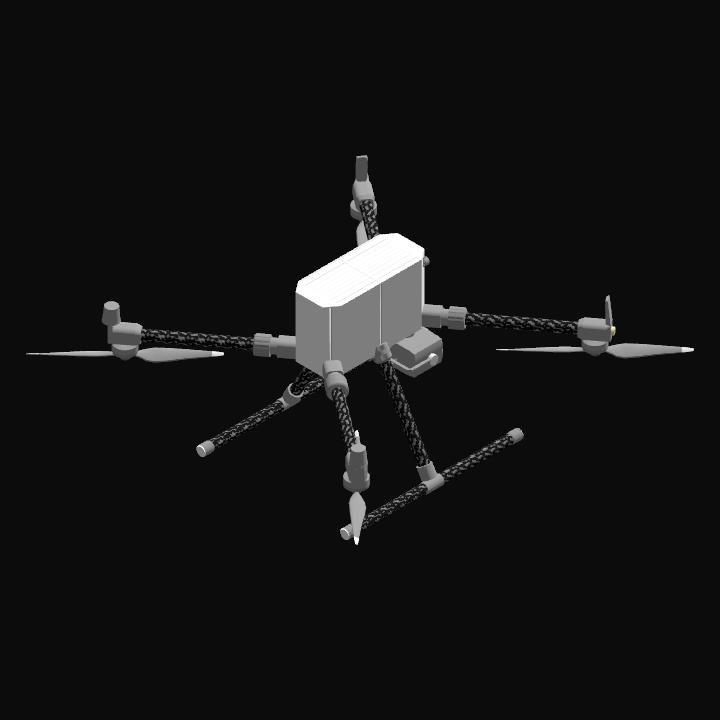
The original model of this quadcopter was the DJI matrice-350-rtk. The quality of the model is not very high. Considering the performance of the player's computer is not good.
The quadcopter uses a new PID flight control algorithm. Compared to the previous flight control, it is more robustness and anti-jamming.
The PID flight control algorithm is also applicable to other quadcopters. You can change the parameters.
Maximum load 100 kg. Overloading can make it unstable.
Maximum horizontal speed : 12 m/s.
Maximum vertical speed : 5 m/s.
This craft needs to be above 60 frames per second to run stably !
AG 1 : Turn ON
AG 3 : Camera Zoom
AG 4 : Set AGL
AG 6 : Light
GENERAL INFO
- Created On: Windows
- Game Version: 1.3.115.0
- Price: $87k
- Number of Parts: 178
- Dimensions: 1 m x 3 m x 3 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 205kg
- Dry Mass: 205kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|

No Comments
2 Upvotes
Log in in to upvote this post.