





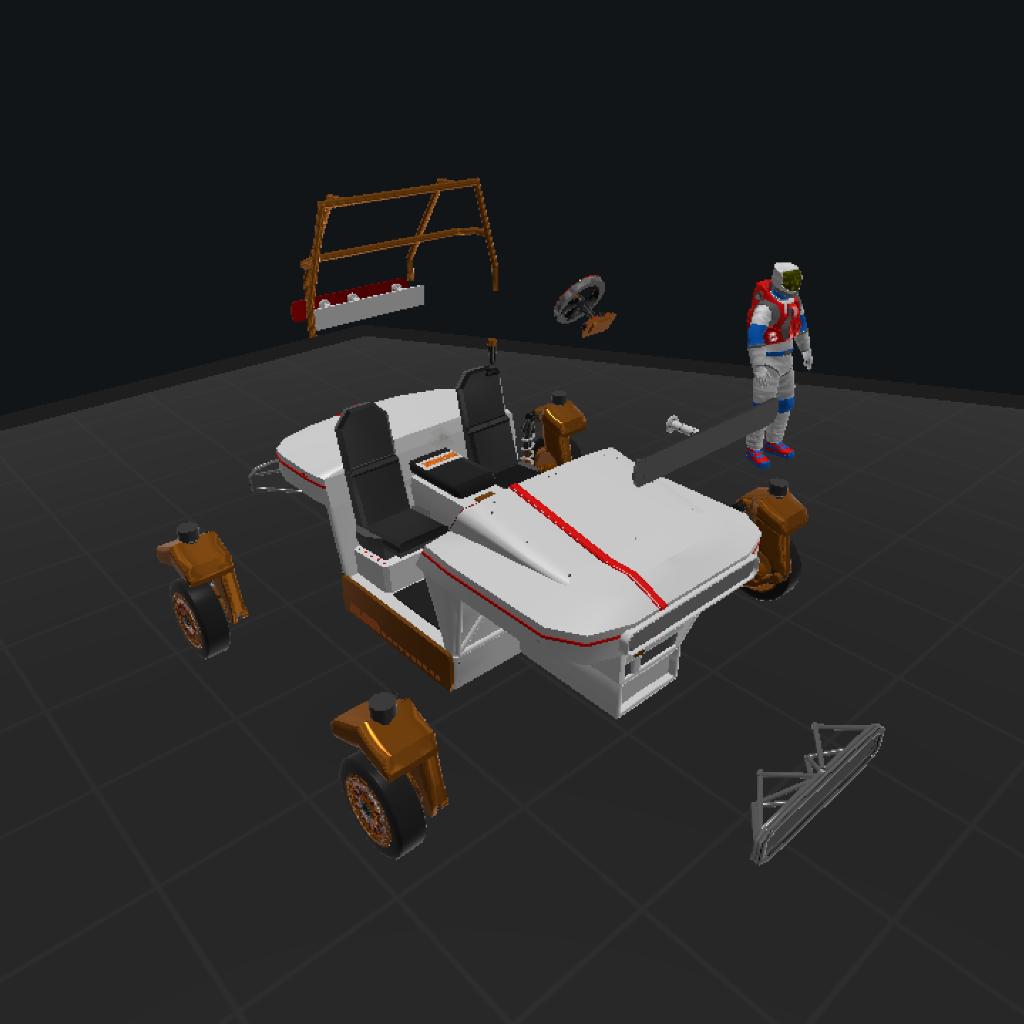
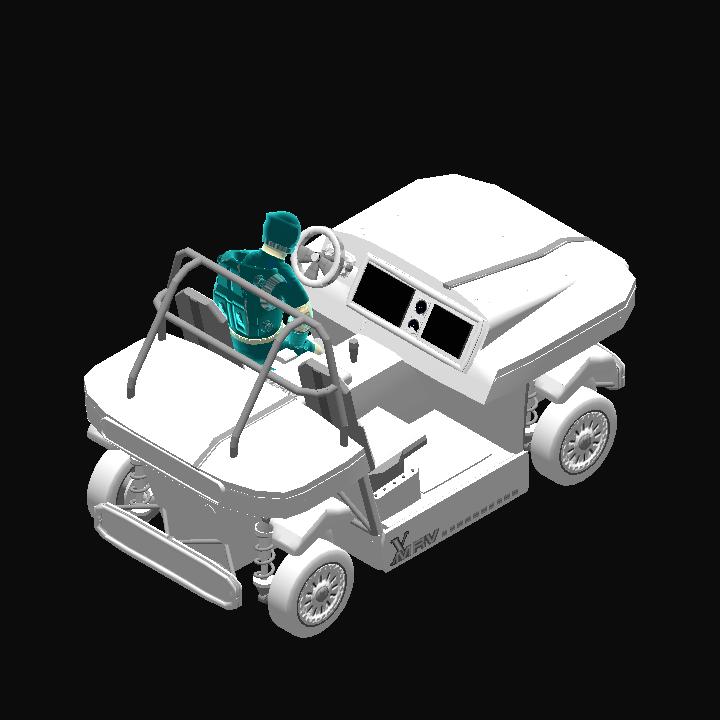
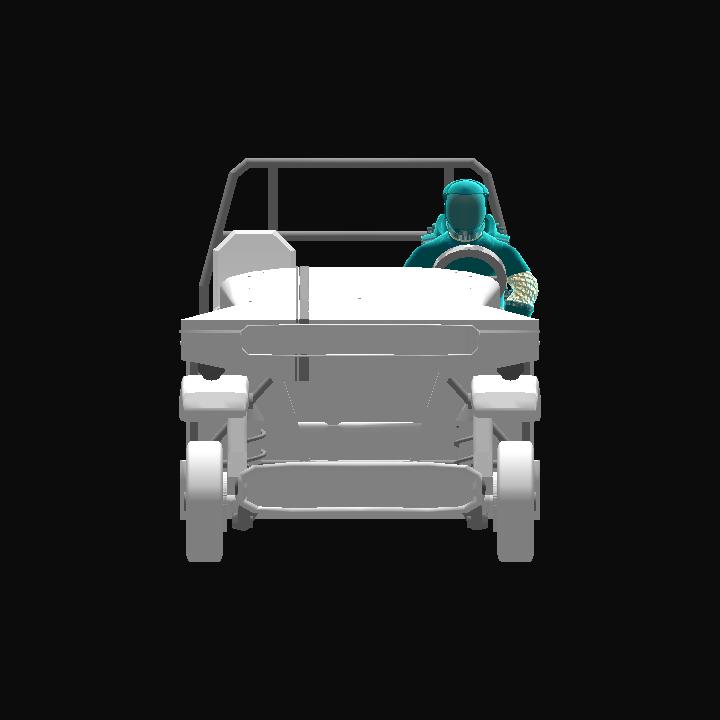
The Modular Robotic Vehicle was created by NASA in colaboration with GM and features a "Drive by Wire" control system for 4 individual electric wheel motors with 180 deg turning angle on each wheel, and made way for the control system on the new electric Hummer. There are 3 driving modes, with control description on left MFD.
.
"Steering Wheel" - "Pitch" for throttle, "Yaw" to steer like a car, with a stability control program that has a near 0 turning raduis at low speed
.
"Joystick" - "Pitch" and "Roll" work as a translate mode, in the direction the right joystick is angled - the throttle is controlled by the level of "Pitch" and "Roll" combined (roll right will point all 4 wheels 90 degrees right, with throttle increasing as roll input does)
.
"Steering Wheel" and "Joystick" - same controls as "Steering Wheel" with 90 degrees of all wheel rotation using "Roll"
.
MFDs indicate operating mode, speed, turn rate, G force, heading, incline, Lat/Long, and speed and battery guages. Great for transporting astronauts around the launch complex...and wheeling some turns!
.
Thank you @SoulBlazer for the testing help!
- ...and Thank You Everyone for 5000!
GENERAL INFO
- Created On: Android
- Game Version: 0.9.616.1
- Price: $6,993k
- Number of Parts: 394
- Dimensions: 2 m x 2 m x 3 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 300N
- Engines: 1
- Wet Mass: 4,221kg
- Dry Mass: 3,849kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|

Hey man, you ok?