
- brakes slider 100%
- slider 2 100%
- roll slider to turn the turret (100% = 175°)
- slider 1 to set the angle of the turret (100% = 85°)
- lock direction same as aimed with nav ball
- select the chip on the blue rocket and set control to missile (small, in the middle on blue stripe)
- throttle slider to 100%
- select chip on rover and change control to rover again (big, on top of the rover)
- set throttle slider to 100%
- hit spacebar three time to trigger all stages (buffer stage, engine start, launch)
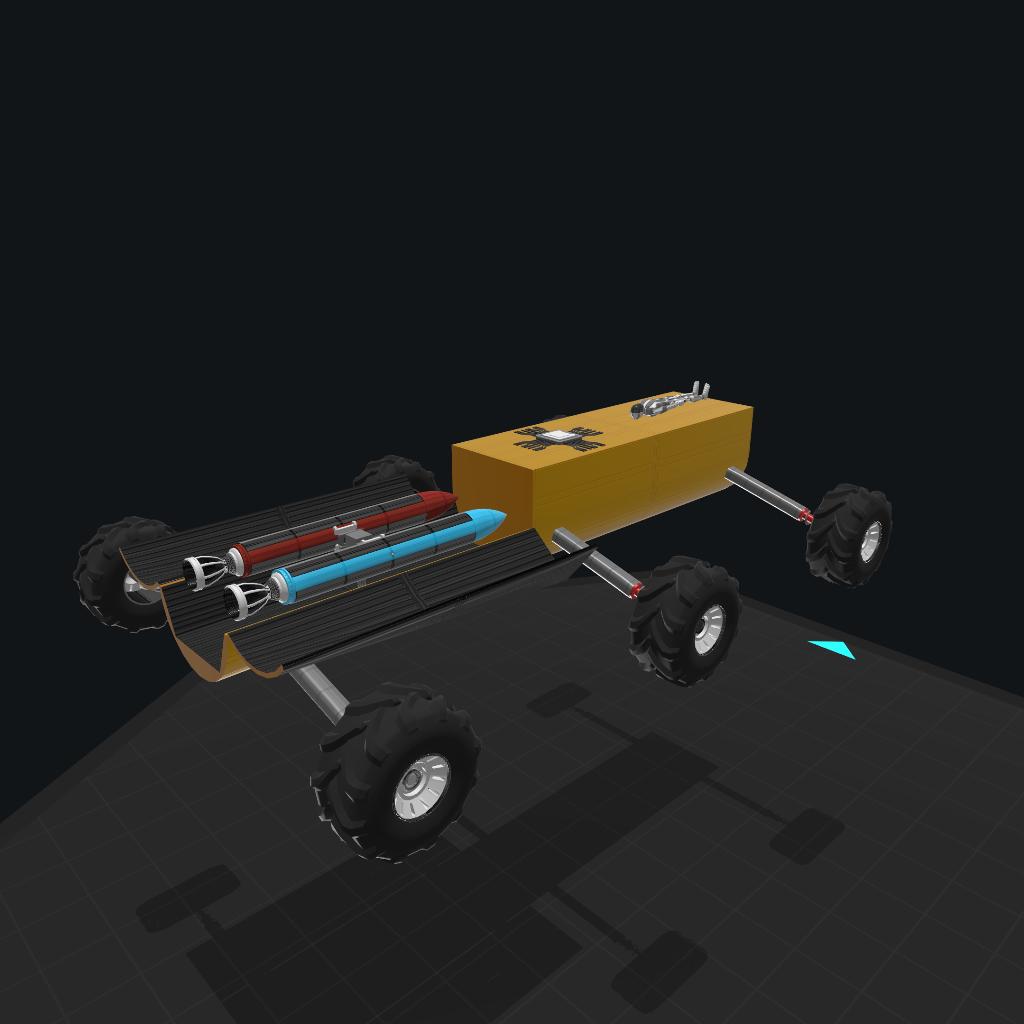
the rover is driveable with "wasd" or pitch and yaw.
the lid can be closed with activation group 1.
the red missile is unstabalized.
the blue missile should follow the aimed direction.
the blue rocket can be launched more realistically if rover throttle is off, but the red missile will simply fall down. can be changed in the stageing to launch them seperately. i uploaded this version for demonstration purposes. as well can the red missile be exganged by a copy of the blue one or simply copy the chip (drag and weight are set 0%) onto the red missile. again the staging is intended for launch order. otherwise refer to the instruction above.
GENERAL INFO
- Created On: Windows
- Game Version: 0.6.7.2
- Price: $955k
- Number of Parts: 36
- Dimensions: 2 m x 6 m x 10 m
PERFORMANCE
- Total Delta V: 12m/s
- Total Thrust: 50kN
- Engines: 2
- Wet Mass: 98,233kg
- Dry Mass: 80,711kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|---|---|---|---|---|
| 1 | 2 | 12m/s | 50kN | 23s | 98,233kg |
No Comments
No Upvotes
Log in in to upvote this post.