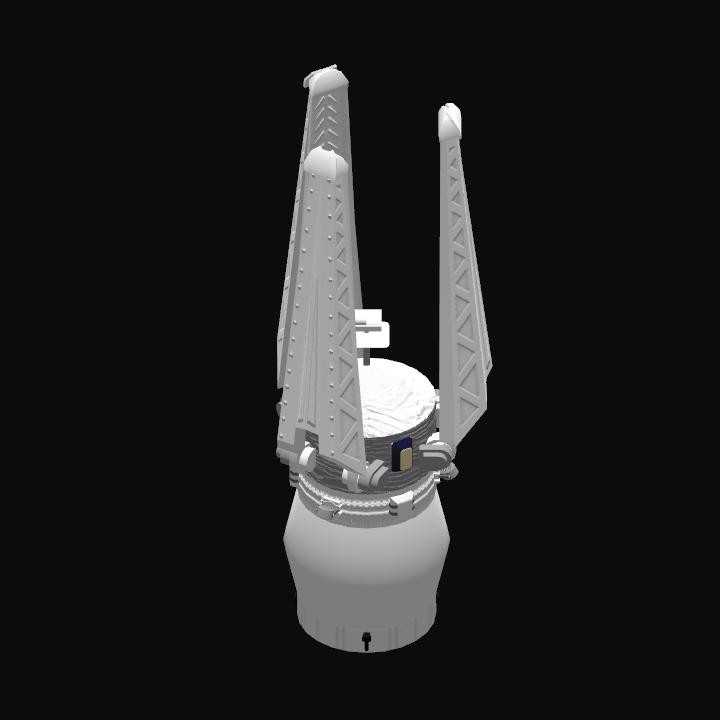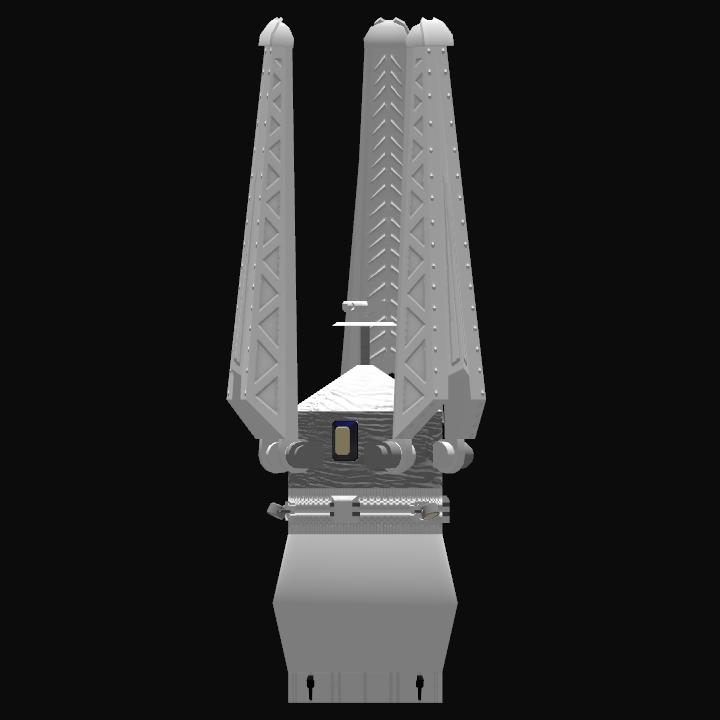
This is the download for the lander I used for this complex mission.
PLEASE NOTE:
-Lander is made for planets with thick atmospheres since it uses air resistance to slow down
STEPS (activate systems manually):
-allow a rocket carrying the lander to sustain the atmosphere entry before releasing the probe
-once probe is released, pause the game and IMMEDIETLY activate all 3 merlin legs and lock heading to 90°
-probe slows down to around 30 m/s
-deploy parachutes when ready
-probe slows down to 5-3m/s
-activate the fairings covering the rover
-touchdown on surface
-activate solar panels on the lander
-activate the side interstage connecting the rover to the lander
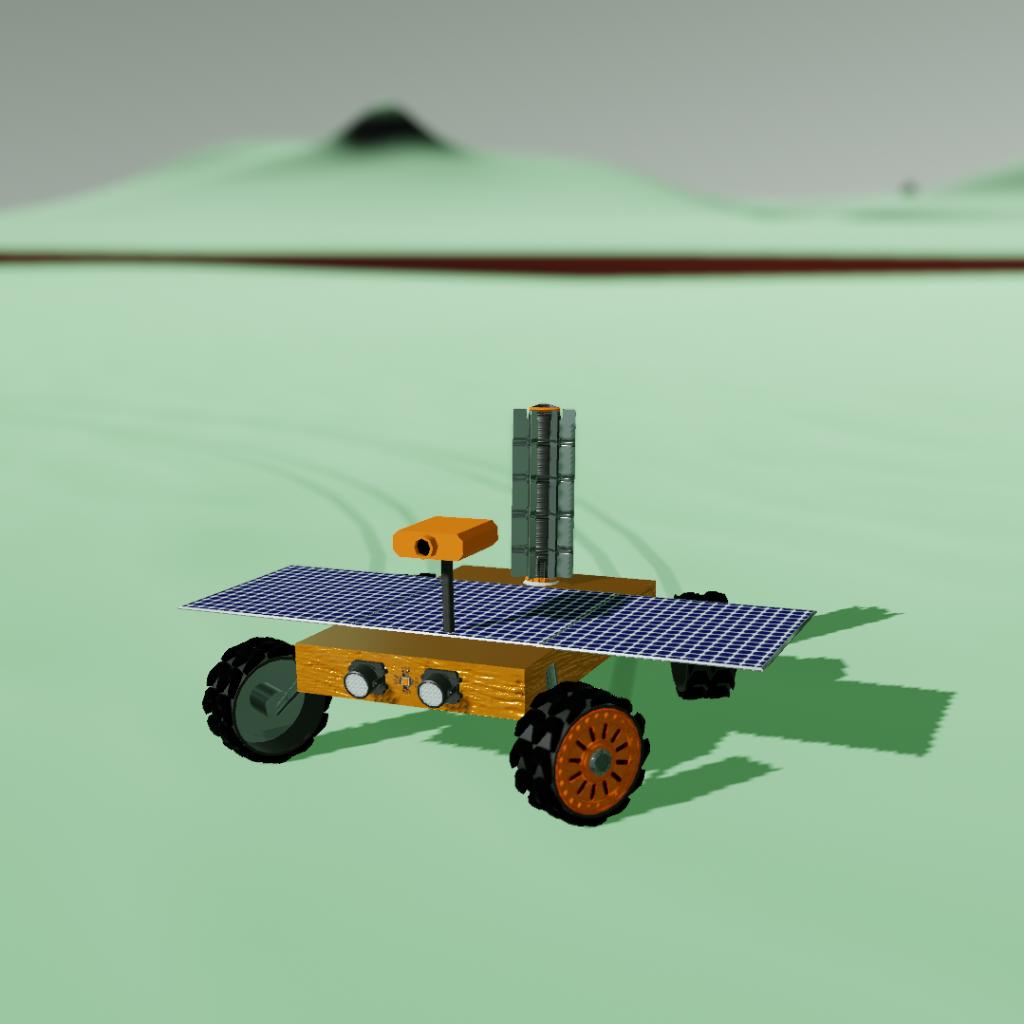
-switch to the tiny command chip of rover located on the front face of the rover between it's headlights
-disembark!
HOW THE MISSION WENT:
The APEX 5 rocket carrying the rover lander took off at midnight, reaching an orbit with Droo before it started a burn that would direct it to Sergeaa, a mysterious Venus-looking planet that I was really curious about. After a month, the rocket reached it's periapsis with it's target, performing a deceleration burn to put it in orbit.
I waited until Sergeaa was at a point where my targeted landing spot has reached the light side of the planet. Once the waiting was over, I started another burn which would direct me on a collision course with the landing area, which was situated near the largest lava lake on the planet. Switching to the final stage, the rocket started a scorching entry into the thick atmosphere of Sergeaa. This is when I realized something was going wrong.
The air resistance of the heat shield was causing the craft to slow down, altering it's route until it was on a direct collision course with the lava lake. I realized that due to the lack of remaining fuel, I would be unable to steer the craft out of the way using my thruster. So I waited until the burn had finished, disconnecting and switching to the rover landing module. I had an idea.
Using the air resistance of the merlin legs when deployed and my gyroscope, I directed the probe into a rotation where the merlin legs would act as a sail, veering the course of the probe further and further before it eventually reached the desired landing area again. I waited till 1000m surface alt to release the parachute, which slowed the fall of the probe to a crawl. I also released fairings that shielded the rover.
Now it was only about the waiting game. The landing legs of the probe gently touched the ground, absorbing the miniscule 3 m/s impact. The mission was not over yet. It was time to release the rover to start it's long journey across the green sands and beside the lava lake. The rover released, falling to the ground and receiving no damage. The high heat insulation of the rover was able to handle the high temperatures of the Sergeaanese surface as it started to crawl. The lander became a sort of unmanned Sergeaa base, while the rover started it's slow exploration.
Mission success!
GENERAL INFO
- Created On: Windows
- Game Version: 0.9.923.0
- Price: $1,685k
- Number of Parts: 41
- Dimensions: 9 m x 3 m x 3 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 10,781kg
- Dry Mass: 9,683kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|