


Are you tired of having to constantly dock craft manually? Does the thought of having to dock yourself send shivers down your spine? Do you want to finally cease the need of docking manually and watch your craft do routine docking automatically?
Well worry no more!
North Star Software Engineering Introduces the AutoDock™:
The program that is designed to finally eliminate the need of manual docking! Just edit the needed variables in program file and watch your crafts dock autonomously while you relax and watch them do so!
The program is flexible enough to run on any well-engineered craft, that mostly implies that the RCS of the craft provide stable thrust in each direction, preferably having the same thrust in each respective direction.
You can quickly test the AutoDock with this craft here.
AutoDock SetUp Manual
PLEASE READ THIS
AutoDock program has comments inside of it that tell how to setup values for its proper work, but im still gonna make a detailed manual on how to setup program and how to use it.
1. Program Variables
For proper work, AutoDock requires you to set the next values of craft that it is installed on:
AGAutoDock- Activation Group that will enable AutoDock.- AGAutoDockManualOverride - Activation Group that activates manual override mode. This variable is not necessary, but still recommended to set in case of unexpected program behavour.
DockingPortName- Name of craft's docking port.CraftSize- Size of craft in meters. Basically - set this value to width, length, or depth of craft, which one is highest.RCSThrust- Enter max thrust of RCS thrusters in one direction, for example, forward, in newtons (N). If the values of thrust differ (ex. if forward thrust is bigger than sideways), enter value that is lowest (in this case - sideways thrust).- DevLogEnabled - Determines if dev logs are enabled or not, they will be shown in flight log. You can disable them.
VelocityLimit- Sets the max velocity relative to target, in m\s. Recommended: 4m\s <=RCSAccelerationLimit- Sets the max acceleration of RCS thrusters in m\s^2.
Recommended: 1m\s^2 <=AllowedDeviation- Sets the max allowed deviation of variables, in meters. Recommended: 0.1m <=
Note - VelocityLimit, RCSAccelerationLimit and AllowedDeviation are normally set to sliders 2,3 and 4 respectively, but you can hardcode them into system if you need.
2. Program Modes
AutoDock has 2 modes:
DEFAULT (UNIVERSAL) MODE
This mode is a standart mode for AutoDock. In this mode, AutoDock uses Center of Mass (CoM) of target craft and targeted docking port as references to make so-called dock zones.
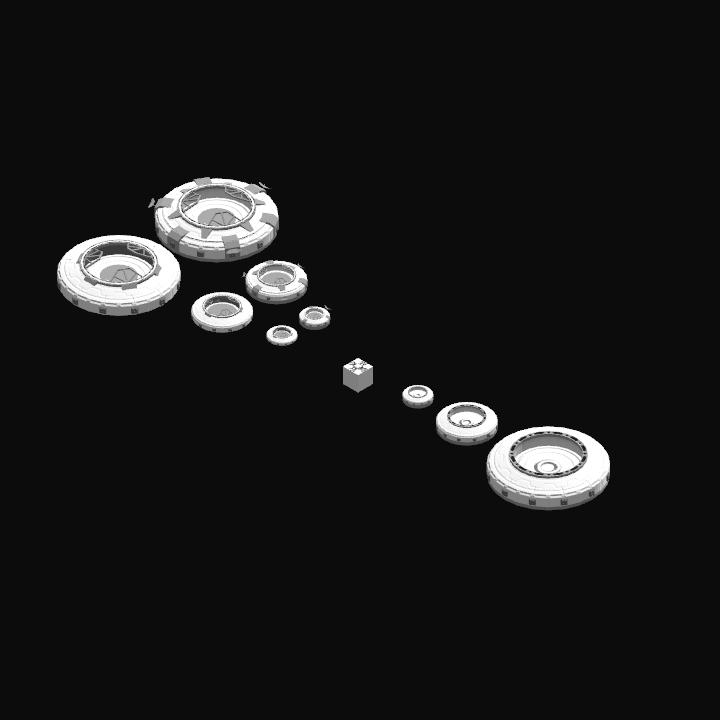
What are dock zones?
These are points that help craft approach the docking port before docking. Normally, program moves to main docking zone first, and then docks with target. If it cant find direct path to it, it moves to one of supplementary zones (there are 4 of them), until it has a viable direct path to main zone, after which, it moves to main.
Here are visualization of docking zones (zoom in to see details):

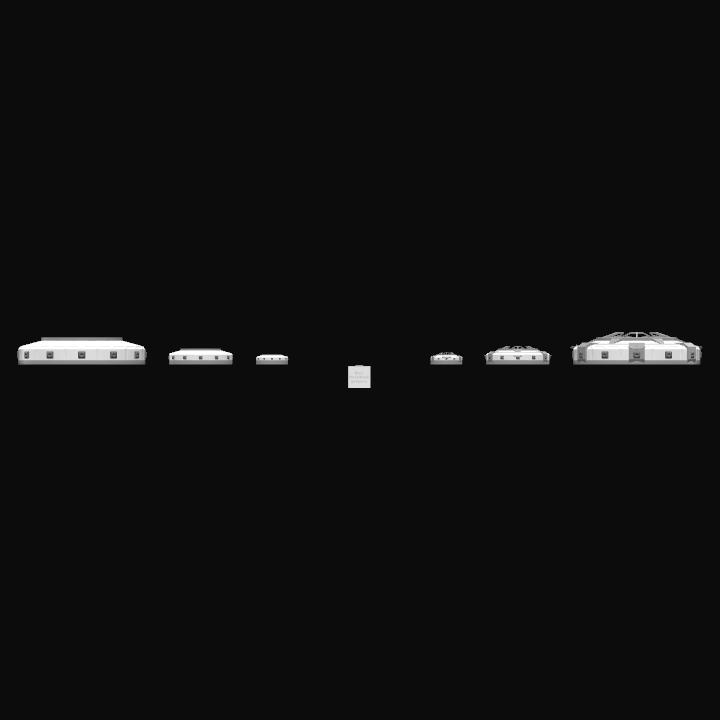
Default mode can work with any target craft that has docking port, but it has a pretty big problem - and that is its method of creating dock zones. To make them work properly, docking port of target MUST point in opposite way from CoM (like on upper image), otherwise, dock zones will be placed in wrong locations, which can disturb program.
Here is the visualization on how port placement affects this mode:

Vector that is yellow is acceptable, but a bit offset.
Red vector is completelly misplaced due to this mode's behavour.
Overall, default mode is made primarily for docking to other crafts, or small space stations.
ADVANCED MODE
Advanced mode is made specifically for crafts that have a lot of docking ports. It can create better dock zones, but it requires usage of specialized docking ports that are included in this post.
Here is how you setup and use it:
You need to have specialized docking port (SDP for short) on your target craft to make it work. The way that this mode works is that it connects to program installed in SDP, and makes it broadcoast required variable for docking zone to main craft. In this case, it uses docking port and command disc of SDP as references for DZ vector, which in return makes a better docking variable.
In short, you can place SDP anywhere and the DZ vector will always match docking port facing.
Setup procedure:
- Place SDP on your craft
- Set a name for docking port part. (MUST BE UNIQUE ON THIS CRAFT)
- Select its command disc (its named Docking Port ABC-01 Relay by default)
- Name command disc in this format: [Docking Port Name] Relay.
- Go to its program and set variable
DockingPortNameandreceive functionto name of docking port part. - *OPTIONAL Set name of red rectangles and orange circle parts to [DockingPortName] Light (number). Note - dont change Light number, only edit name of docking port part. They will activate when this SDP is targeted by craft running AutoDock in Advanced Mode.
Image for convenience:

And that concludes AutoDock manual.
Before we finish, here are some notes:
- The program can be FPS sensive, if you have a weak FPS in game, i recommend to not set
RCSAccelerationLimit higher than 0.5 m\s (ideally - 0.25m\s), and AllowedDeviation - to at least 0.05m - Program might act a bit weird if RCS on craft is also set to attitude controls, but that should not be a big deal in most cases. Still might be a good idea to limit RCS to respond to translation only.
Currently, program can work fine ONLY if docking port facing matches pilot orientation (ex. Docking port is placed on the nose of craft.) I tried to make it work with additional command disk, so that you can switch to it to set orientation to match the facing of docking port, but disk did not want to respond to attitude controls, so that idea is scrapped... Tho maybe i will find a way to make it work, if so, i will write it here.- Avoid using " - " character set in target craft's name (character set includes 2 spaces, not just "-". Program uses mentioned character set as a divider between target craft name and targeted docking port name. Failing to follow format can result in incorrect program work.
I hope that was not too much of a hassle to read through this, and i hope you will like what i designed!
If you have any questions\problems, feel free to ask me in the comments!
GENERAL INFO
- Predecessor: AutoDock Program+Parts finished
- Created On: Windows
- Game Version: 1.3.204.1
- Price: $3,529k
- Number of Parts: 423
- Dimensions: 1 m x 17 m x 7 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 1.12E+5kg
- Dry Mass: 1.12E+5kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|

2 Comments
- Log in to leave a comment
-
330 SpaceSciFiCreGER5 months ago
Whenni use this to a Rocket for the Esperanza Station, must i Go First in Orbit or can i begann at surface

@SpaceSciFiCreGER This program is made only for docking, its not an auto-orbit one, you need to start it when you are close to target (appr. 100 m or closer). I did not test program with Esperanza modules howewer, mainly because you cant edit their part names. In theory, you can use program to dock modules to Esperanza, but only in default mode, since you cant install SDP on contract modules.