




Features
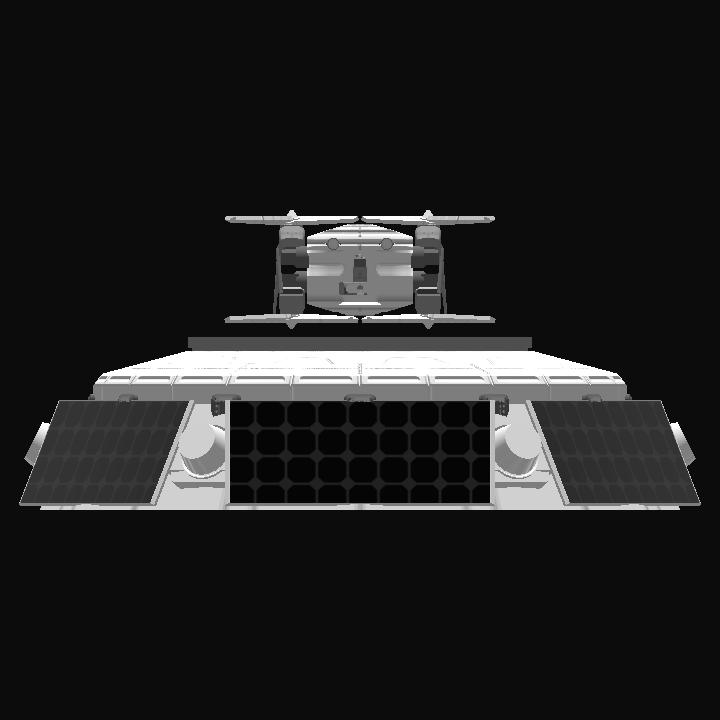
- a very stable ass drone (more stable than me)
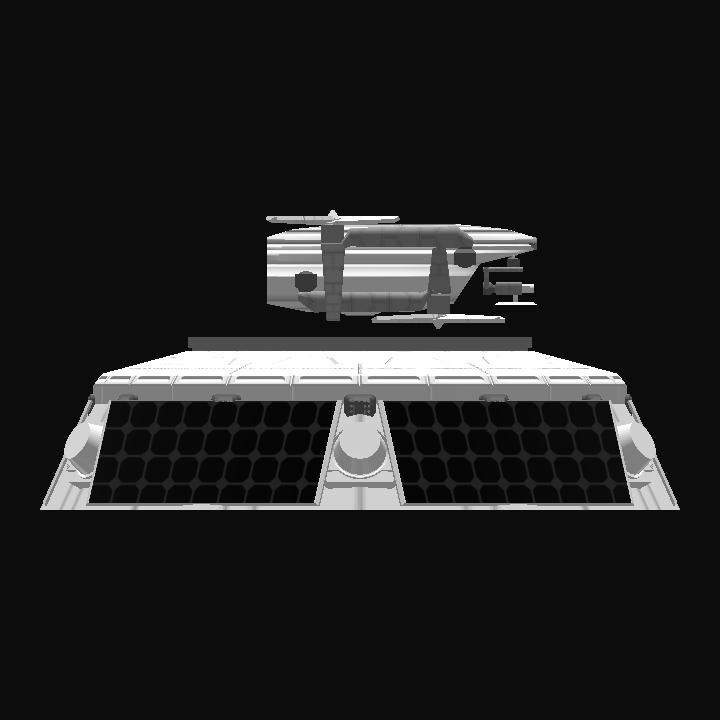
- Foldable
- Altitude hold
- loonngg flight time (i mean it)
- Auto Assemble
- Auto Fold
- Auto Flip up (when the craft is grounded and upsidedown)
- 3 axis camera gimbal (needs vizzy)
- Rechargable
- Ez to pilot (i believe u can)
- Slow ass drone, max speed up to 10m/s or above (turn off Altitude hold for little bit more speed)
- Good for aerial photography or some vids
- Needs improvements
Controls:
Use the Analog joysticks
throttle up: Left stick - up
throttle down: Left stick - down
strafe right: Left stick - right
strafe left: Left stick - left
turn right: Right stick - left
turn left: Right stick - right
pitch forward: Right stick - up
pitch back: Right stick - down
3 Axis Camera Gimbal:
Slider 1: Roll Axis
Slider 2: Yaw Axis
Slider 3: Pitch Axis
Slider 4: Zoom
Return to Base Docking port to charge
(Id like to make this automatic but i rly need help for that)
Ps:
Any suggestions and tips or something wrong pls leave in the comments for further improvements
tnx.
Is there anyway to put this craft on another craft? pls leave ur answer in the comments it would rly help
GENERAL INFO
- Created On: Android
- Game Version: 0.9.801.0
- Price: $898k
- Number of Parts: 93
- Dimensions: 1 m x 3 m x 2 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 3,218kg
- Dry Mass: 552kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|

i got my need
@Caat2 Well it’s $898,000 according to the general info
@JamesValino thanks man
@Caat2 if its not just made of rocket grade tanks haha
@SpaceSharkie201 here
@Caat2
𝙶𝚘𝚘𝚍 𝚚𝚞𝚎𝚜𝚝𝚒𝚘𝚗...
Now my question is why dose the game say this drone costs nearly 1m?
Love the craft, nice work!
OMG
cooooooooooooooooool !
Probably, since it would take less force to make it rotate. Before were you just arabizó go by locking heading or with an program? Fell free to ping me on an unlisted, a tiny drone sounds useful. @JamesValino
@Hannah1212 maybe ill upload it for you to check out and point out some shits in it if that alright?
@JamesValino and it is smaller than a drood
@Hannah1212 does size affects stability, ive been working for a while in making a fpv drone with less program and less axis gimbal and it is being quite unstable
It might slightly since each vizzy program by default runs like 30 instructions per frame iirc. But it’s more likely that any lag in the program is caused by your overall frame rate, which can is harder to fix. You can also increase the instructions per frame of a chip with xml editing. @JamesValino
@Hannah1212 is using another/multiple command chip will help to reduce program lag? Im planning to use seperate command chip for the gimbal to reduce the lag in the program which really affects the gimbal
coughcough* mavic mini cough
@HotTunaCartel the landing pad is a docking port
The funk block is for using all of this stuff(ignore the first 2 sections), which you can also put directly into an input controller. It’s mostly used as a way to type math expressions, you can call green variables, FlightData. stuff, and some part properties you can’t get otherwise. Also if you need to do a lot of math it runs faster than normal vizzy since it’s all in one instruction block instead of many. @JamesValino
@Hannah1212 im really far behind coding haha, btw what is funk block for
I mean if you want to do it go for it, it's just not something with a quick explanation and you'll probably need to understand some vector math. I have a vtol craft with a landing program that is probably similar to what you'd want to do, but I don't think it will be very helpful as example code since it's very inefficient and messy. @JamesValino
@Hannah1212 thanks for the tip
@Hannah1212 i mean the battery warning thing i put in it haha. And yeah maybe return and landing thing is too ambitious but ill try, i mean thats pretty cool innit.
Locking the camera on the horizon should be too hard, just set the pitch rotator to the opposite of your current pitch. Auto landing is a little more complicated, and I’m not really sure what you mean for battery management @JamesValino
@Staticalliam7 thats actually a good idea
Btw thanks for all the upvotes, follow and comments. Appreciate it