
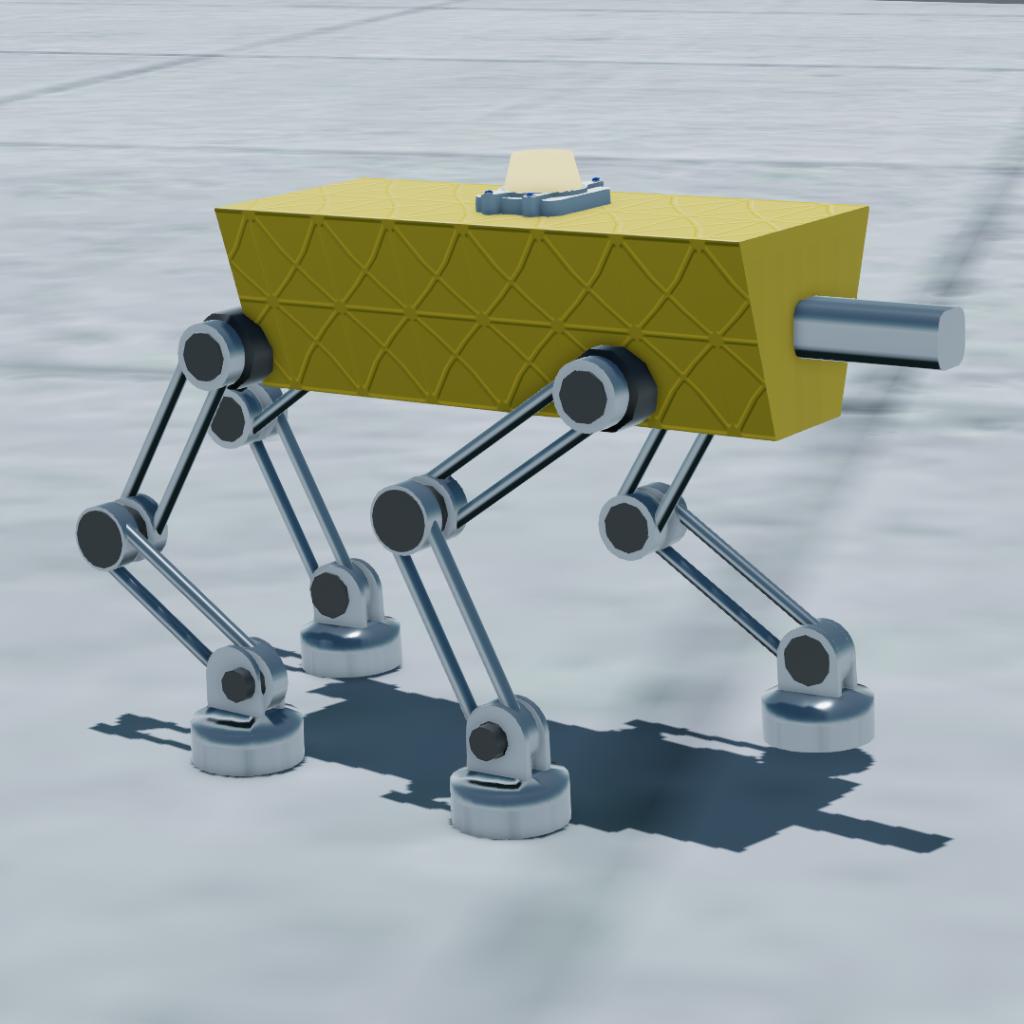

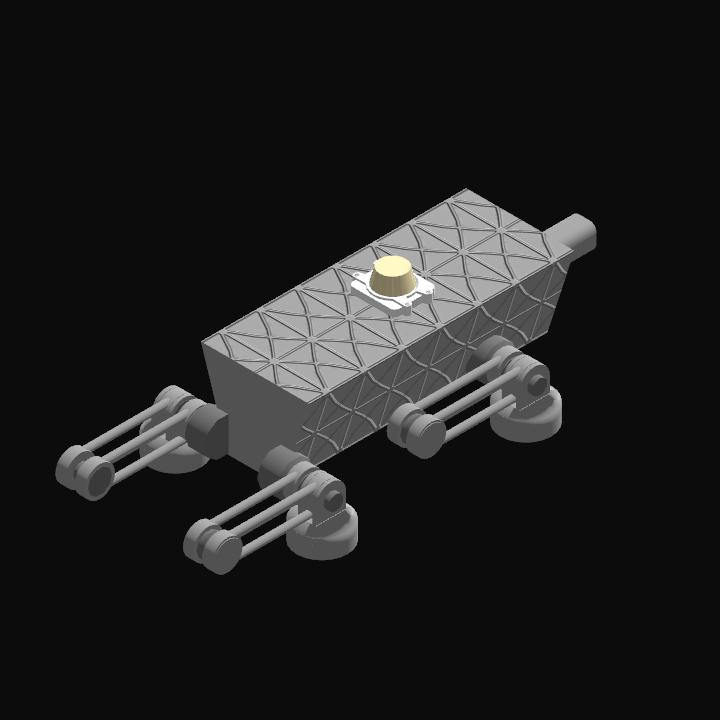
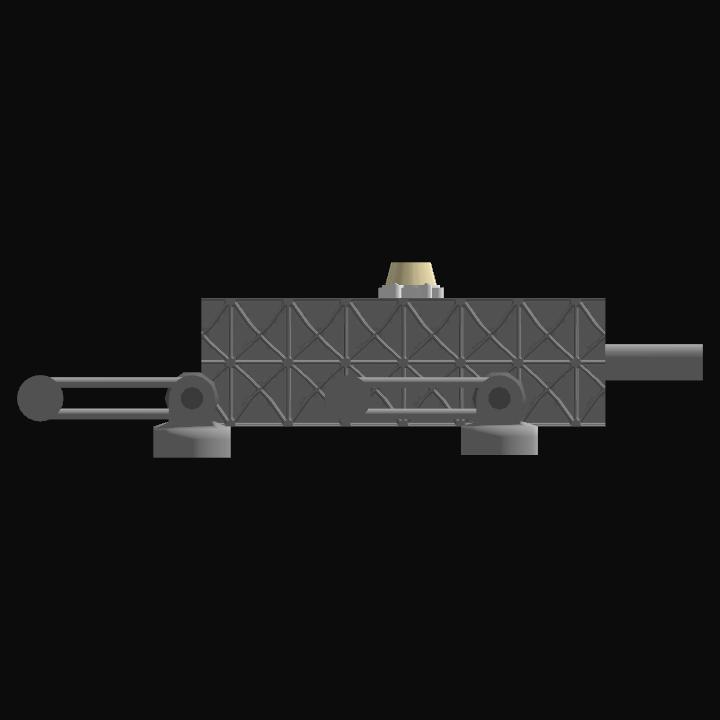
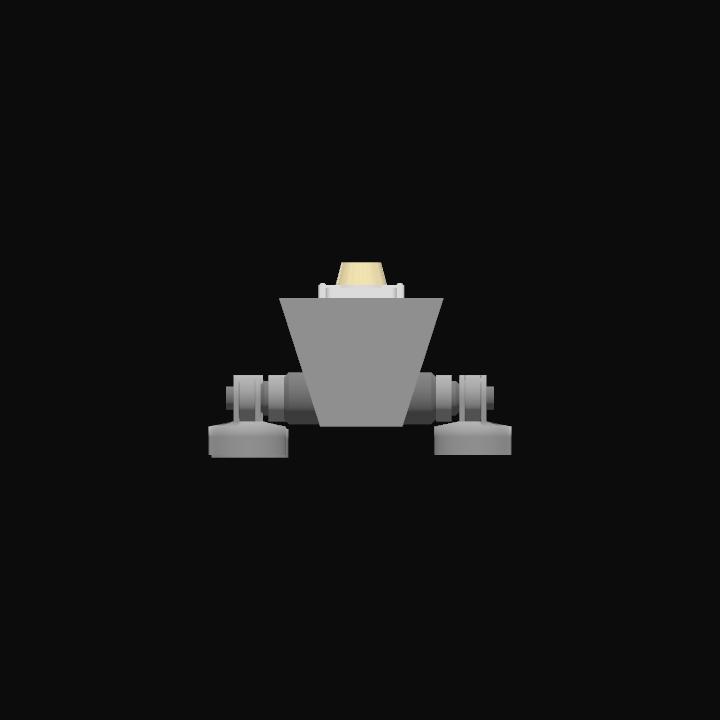
That little mechanism is my first attemp to make a walking robot. Here you can see what it can do:
2x
|
\/
Inability to climb inclined surfaces, friction between feet and surface and slow/laggy turn are the only problems it has.
Controls
Pitch - move forward/backwards
Roll - turn left/right (you need to move backwards or forward to turn)
Throttle - height above surface
GENERAL INFO
- Created On: Windows
- Game Version: 1.3.116.0
- Price: $5k
- Number of Parts: 71
- Dimensions: 1 m x 1 m x 3 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 1,253kg
- Dry Mass: 1,253kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|
7 Comments
- Log in to leave a comment
-
-
818 Jerba1.4 years ago
@Charodey Look into using sin and cos waves, used them on a similar style of walker and they work quite well, walker not so much (dog walkers require a lot of tuning and perfect designing if you don’t want them to bounce around)
-
5,752 Charodey1.5 years ago
@Jerba i recommend to use it with “high” physics frequency, it will work maybe just a little bit smoother, but i think the problem is caused by the program itself.
I heard that “funk” expressions work really fast, so i will use them in vizzy programs (so mechanisms such as walker-prototype will walk smoother) but that will take some time -
-
818 Jerba1.5 years ago
What physics did you use for this? When I run it, the whole movement is jittery instead of smooth. Also, from what I’ve done mech wise, the bigger it is the better. Juno has weird part/ground collision physics and really likes to launch smaller things when they drag on the ground
-
1,113 Silverback+1 1.5 years ago
Good progress. We may soon see one of those giant Star wars walkers around here




I like it!
slope