



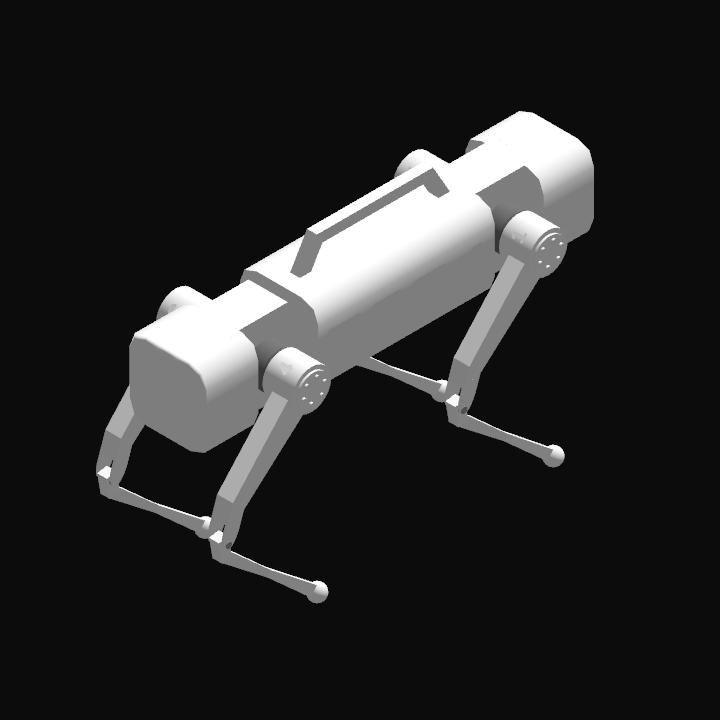
I wanted to try making a walker past the demo stage, and here’s what I’ve got. I based it off Boston Dynamics’s Spot. What I learned from this: Unless made with Sin and Cos wave inputs in mind (which the design originally wasn’t) it’s pretty hard to keep quadruped walkers from bouncing aggressively due to the walk cycle. Suspension helped a lot but it still bounces around. Totally feel free to tear this apart to see how it works, it’s pretty simple. Ask me any questions as well.
Controls:
Throttle- Move forward (It can walk at 100% on regular mode but I recommend not going above 85% to keep it from bouncing too much)
Roll: Turning
Ag1: Stability mode, widens stance to keep it from flipping on steeper hills. You can use 100% throttle in this mode no problem
Ag2: Just a light
YOU CAN USE AUTOPILOT WITH THIS!!!! Just set a heading and it will keep it
Not much else to say, I’ll be starting a new robot eventually. If anyone has a specific style they want to see I’ll try and make it (besides bipedal, those are a whole different realm and I don’t want to deal with balancing)
GENERAL INFO
- Successors 1 craft(s)
- Created On: iOS
- Game Version: 1.3.114.0
- Price: $11k
- Number of Parts: 106
- Dimensions: 1 m x 1 m x 2 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 243kg
- Dry Mass: 243kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|

@VectorY I most likely won’t be doing that for awhile, I’m starting college soon and I don’t have enough time to put into Juno to make a decent bipedal.