




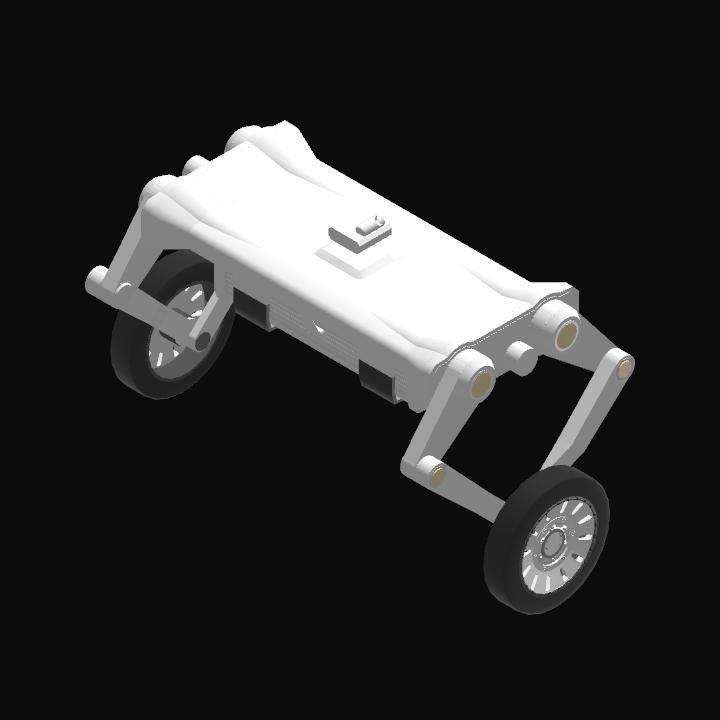
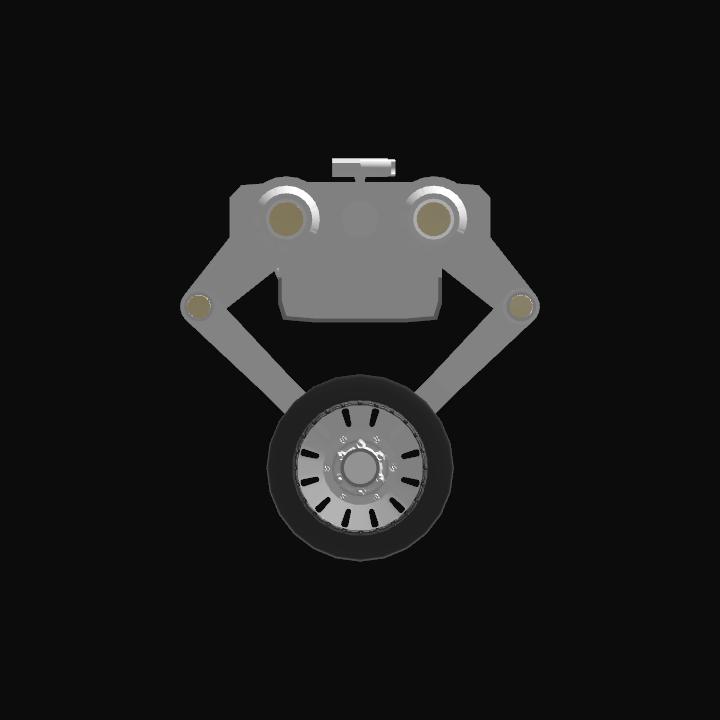
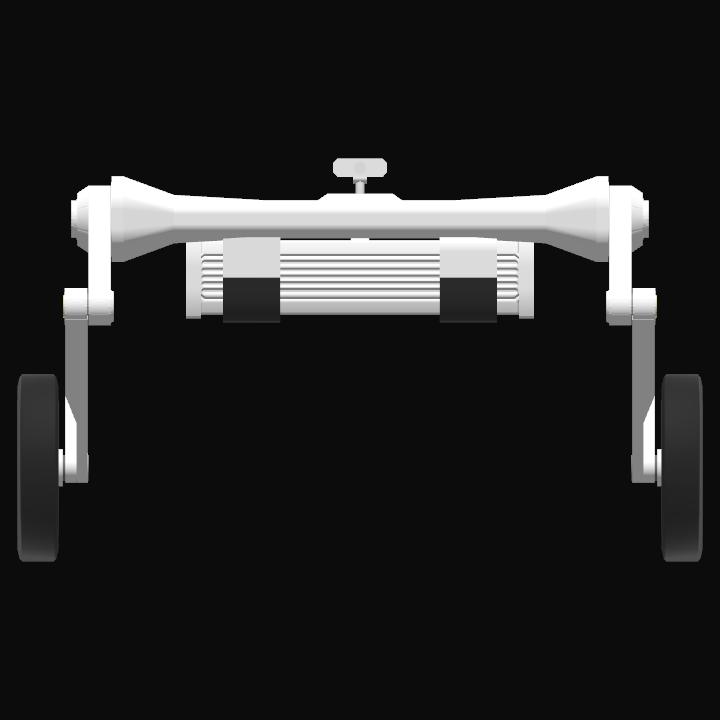
A gyro-free self-balancing vehicle with active suspension.
Control over Pitch, Yaw, Roll.
Slider1: Suspension Height,
Slider2: Suspension Damping,
Slider3: Suspension Force.
Note that it may be unstable at certain frame rates and on sandy or steep terrain. Too low damping may cause shaking.
GENERAL INFO
- Created On: Windows
- Game Version: 1.3.111.0
- Price: $4k
- Number of Parts: 113
- Dimensions: 1 m x 1 m x 0 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 82kg
- Dry Mass: 82kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|
6 Comments
- Log in to leave a comment
-
11.1k York9 months ago
@Samps0n The higher the slider3, the stronger the suspension force, and the less likely it is to deform. The throttle does not have any effect.
-
0 Samps0n9 months ago
This is really clever. I don’t, 100%, have mastery over the sliders or even what 2 & 3 do under most situations but it is very easy to control and I used the dsc pad to ramp down it was keeping the speed of 4-5 m/s well down the runway. Does three impart its ‘force’ by having the bot lean a bit? Also do the wheels have throttle that I control with pitch Or the control stick on mobile? Or is it the force slider? Is the force slider is stronger when the bot is on the higher suspension? Thanks in advance for your time! Congrats on your creation, I am gonna say that I have been threw all the archives and as best I can recall, this craft is unique , and that is a compliment I don’t misuse.
-
-
-



That is so cool I’ll Use it as a reentry probe!