


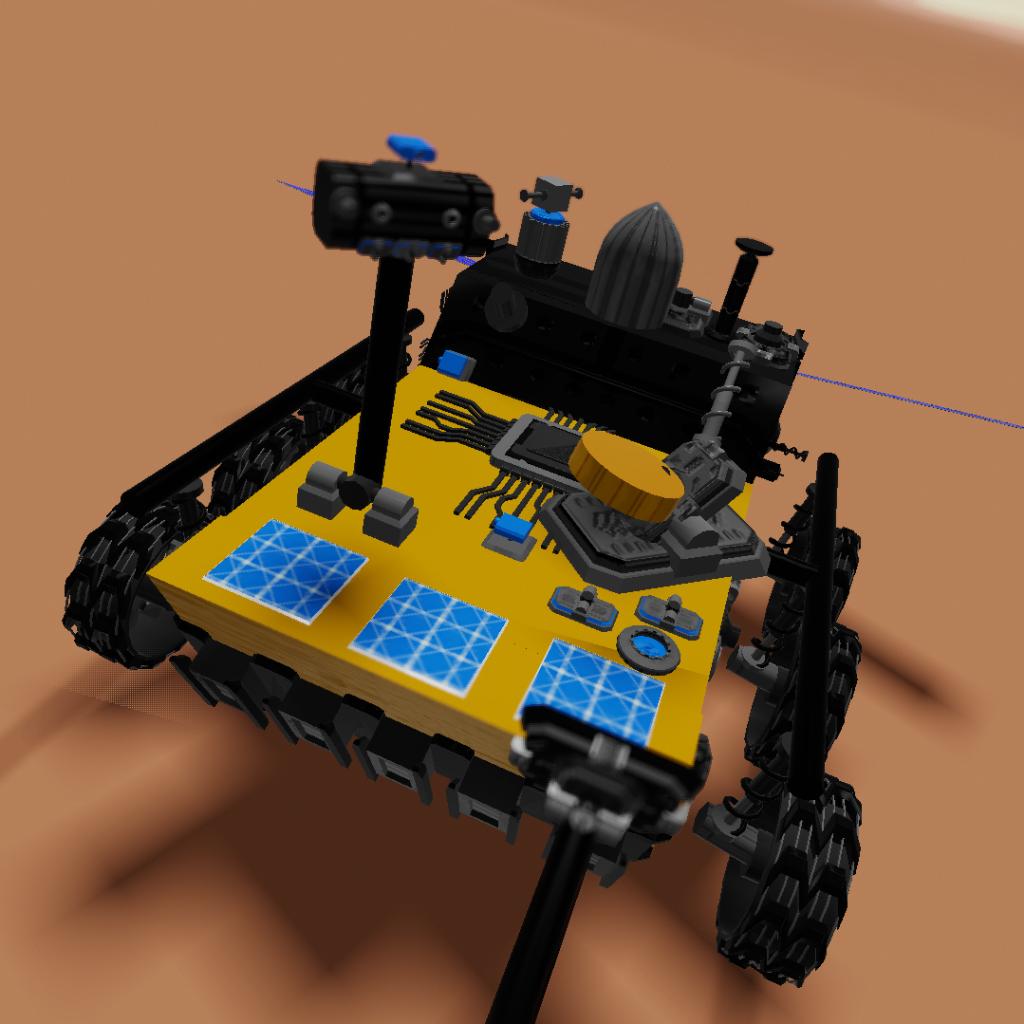
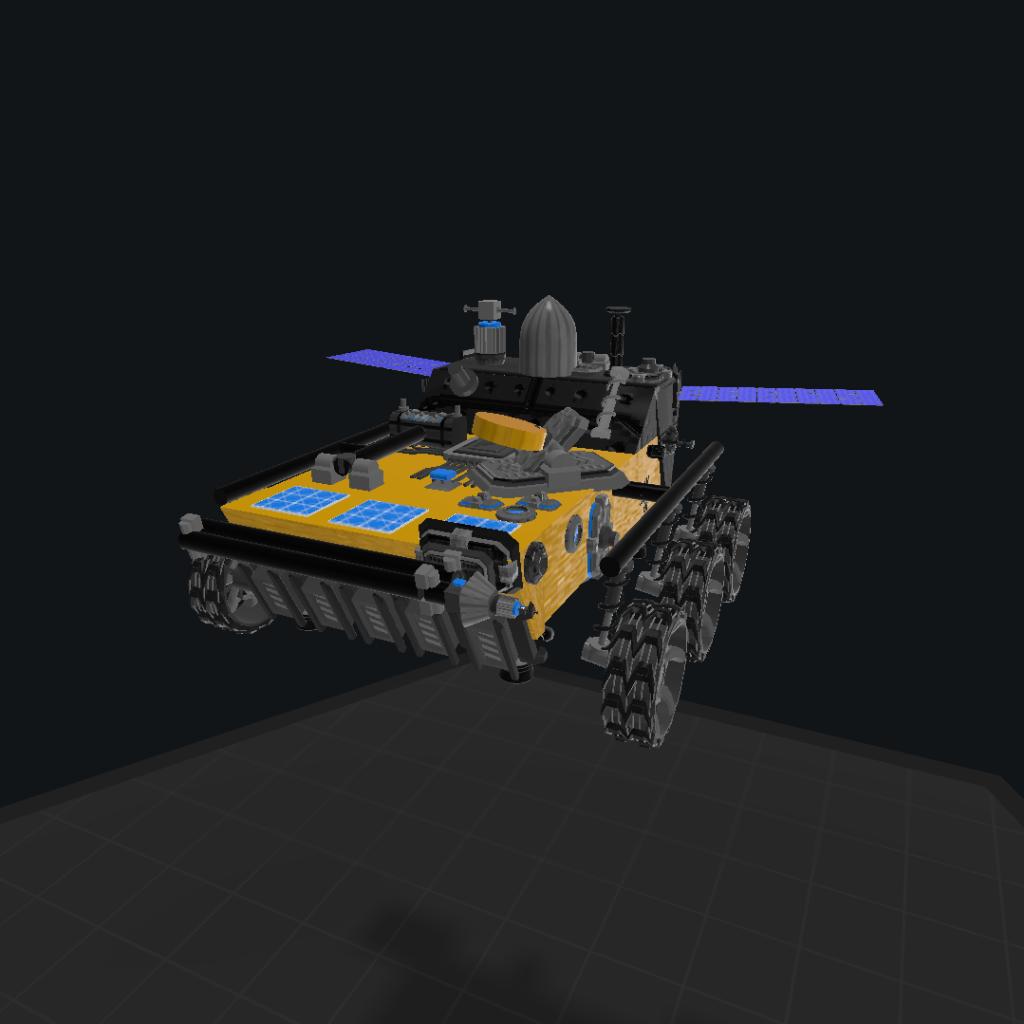
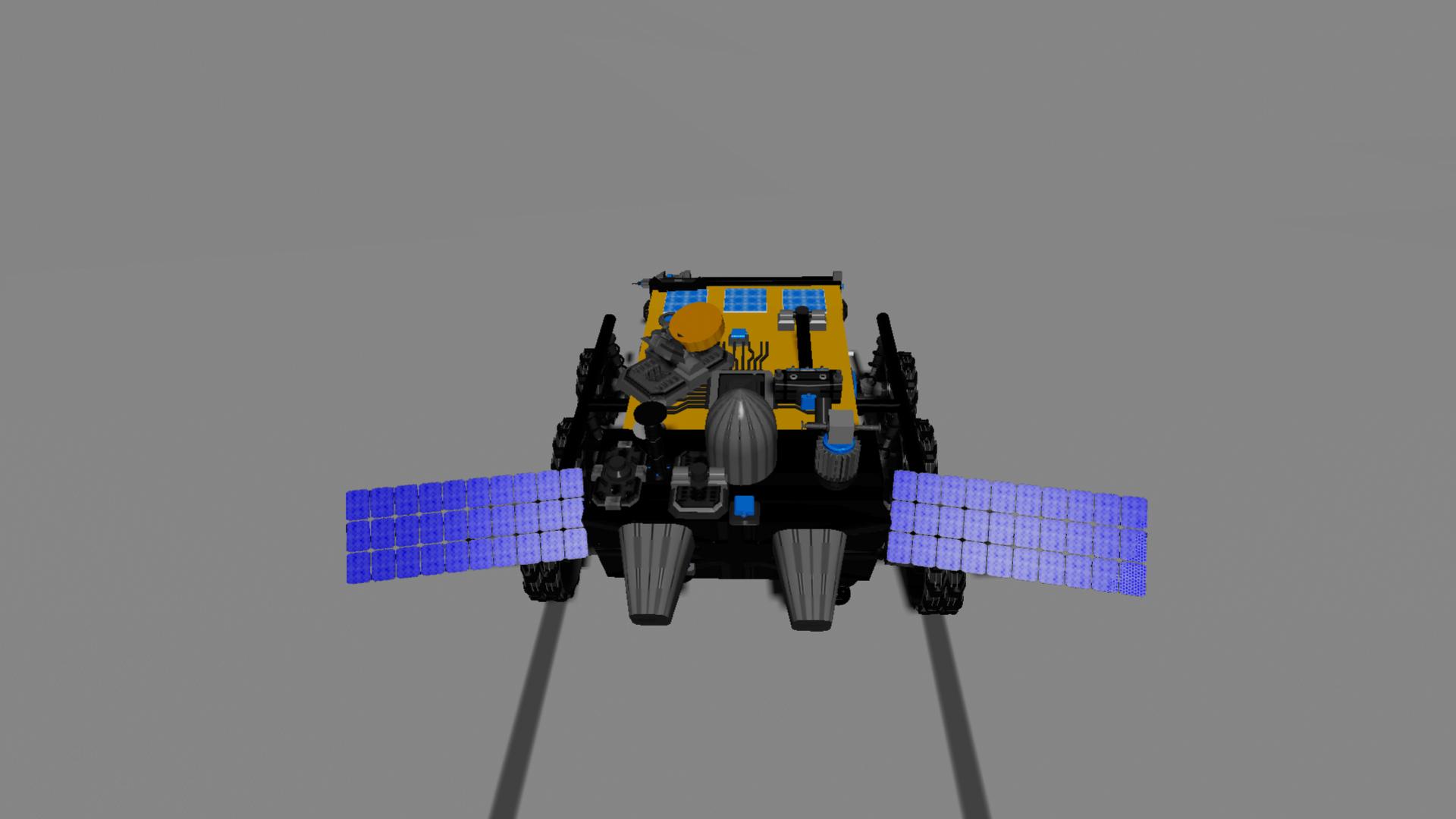
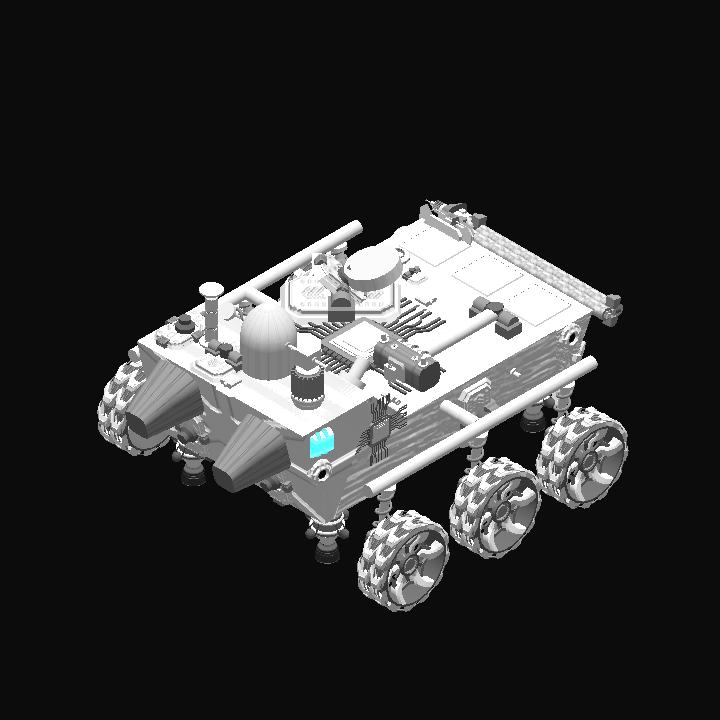
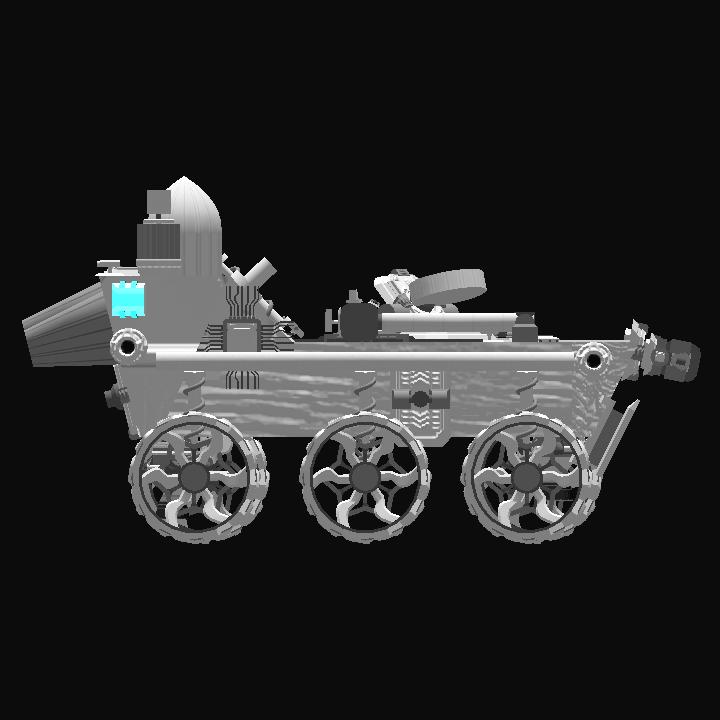
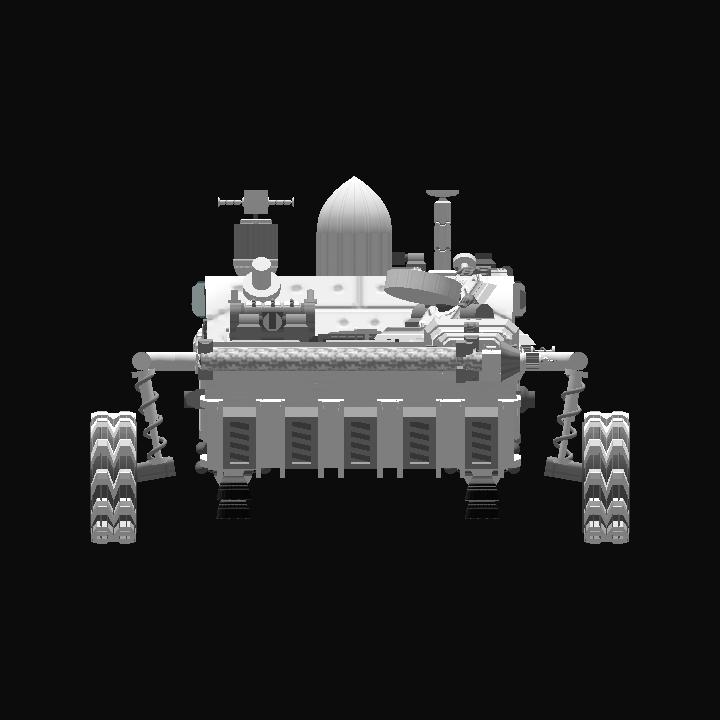
Today i present the MSL, this rover took me a long time to build, but in the end i have got this thing functioning. It has a eye cam, a robotic arm, a drill, antennas, solar panels and several more. I have put several activation groups together.
To control the wheels, make sure to turn on AG 1. Pitch controls the middle wheels to go forwards or backwards. Yaw left turns the 4 wheels for rotation, and roll uses the 4 wheels for acceleration when turning.
For the Eye camera turn on AG 2, and use slider 1 and slide up to deploy the eye cam. Then fell free to use slider 2 for rotating the camera.
To control the robotic arm, wich is AG 3 use slider 1 to rotate the arm. Then use slider 2 to deploy the lower arm then use Yaw to use the upper arm.
To deploy the antenna AG 4 use slider 1 and slide upwards to deploy.
To use the drill AG 5 use slider 1 to turn the drill up or down, slider 2 rotates the drill.
For the AG 6 does the miscellaneous use slider 1 to see some other things in action.
The rest of the activation groups are solar panels and the rcs. There are several cameras placed all around the rover and i labelled them on where they are.
I have taked this to Cylero to test this out, i have installed some decent engines to help decend down to the surface, enjoy the rover ;)
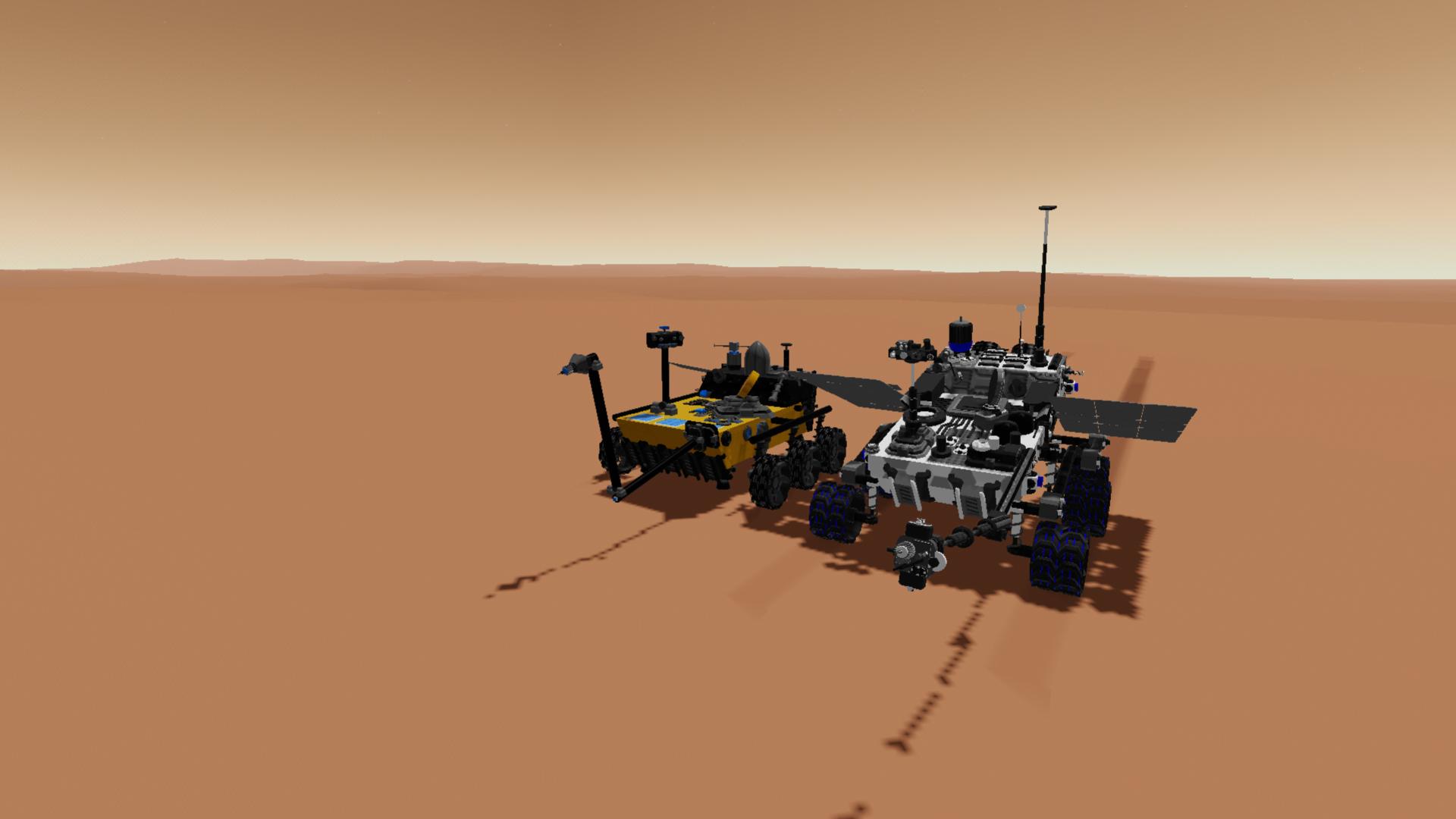
The craft you see in one of those pictures is a rover called (Rover for LEO lll) by Snapdragon. I used their Rover for comparison with mine!
GENERAL INFO
- Successors 1 craft(s)
- Created On: Android
- Game Version: 0.8.107.0
- Price: $1,708k
- Number of Parts: 110
- Dimensions: 2 m x 3 m x 4 m
PERFORMANCE
- Total Delta V: 444m/s
- Total Thrust: 23kN
- Engines: 4
- Wet Mass: 5,724kg
- Dry Mass: 3,304kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|---|---|---|---|---|
| 1 | 4 | 444m/s | 23kN | 1.7m | 5,724kg |
This is my best creation so far!