
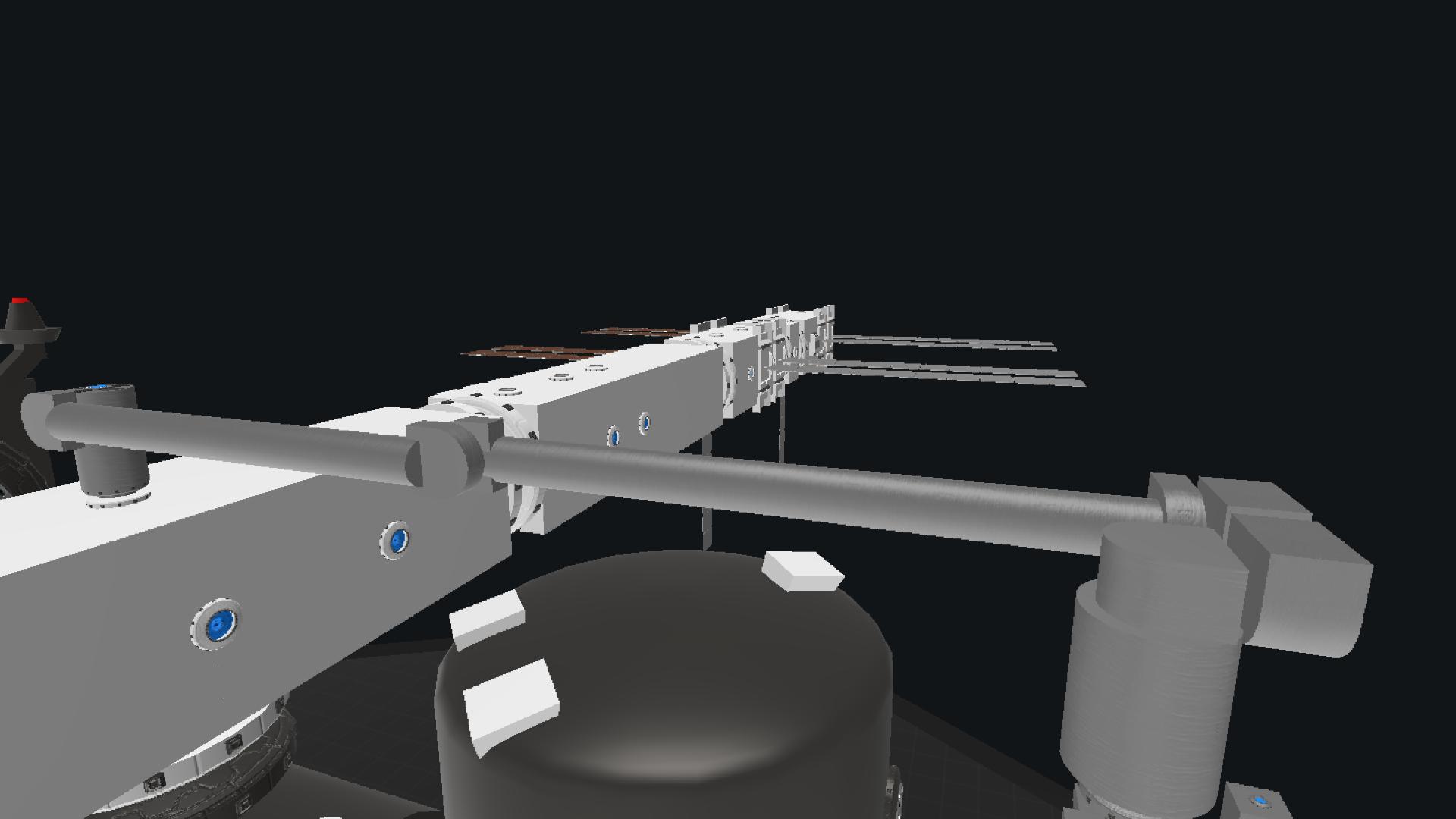
It is a robotic arm that grapples anything to their respective places. The 2 docking ports are both base ports and grappling ports. It was launched on STS-100 together with MPLM Raffaelo.
Activation Groups and Inputs:
Joint 1: Activation Group 1
Input: Slider 1
Joint 2: Activation Group 2
Input: Slider 1
Joint 3: Activation Group 3
Input: Slider 1
Joint 4: Activation Group 4
Input: Slider 1
Joint 5: Activation Group 5
Input: Slider 1
Save it as a subassembly. This is an Updated Version.
GENERAL INFO
- Created On: Android
- Game Version: 0.9.509.0
- Price: $307k
- Number of Parts: 19
- Dimensions: 2 m x 1 m x 15 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 3,006kg
- Dry Mass: 1,265kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|

9 Comments
- Log in to leave a comment
-
5,542 CedandRossSpaceAgency9 months ago
This is a pretty old craft tho
Slider 3 & 4 wasn't even here yet when I posted this -
5,542 CedandRossSpaceAgency9 months ago
@OrionCX Actually
logic
Well, if the first rotor is set in a slider percentage and the second rotor is set in a different percentage and you don't change the percentage back then the first rotor will be set to the 2nd rotor
You just need to remember what you set to the first rotor and also the second rotor so that before you enable that specific rotor that rotor will stay on that set percentage -
255 CFXA9 months ago
@CedandRossSpaceAgency thx for replying, but even if I try with activation groups it doesn't stay the same once I set a value for 1 rotor and disable and turn on another and orient rotor 2 and disable that and get back to rotor 1 it automatically chnages the orientation to the rotor 2s, buy your arm just doesn't do that the rotor stays the same orientation as it is so that I can orient each conveniently, so I would happy to know how...
-
-
255 CFXA9 months ago
yo hoW did you make all that joints into 1 slider and also made it Work need it for a project
-
-
-


i'm sorry