
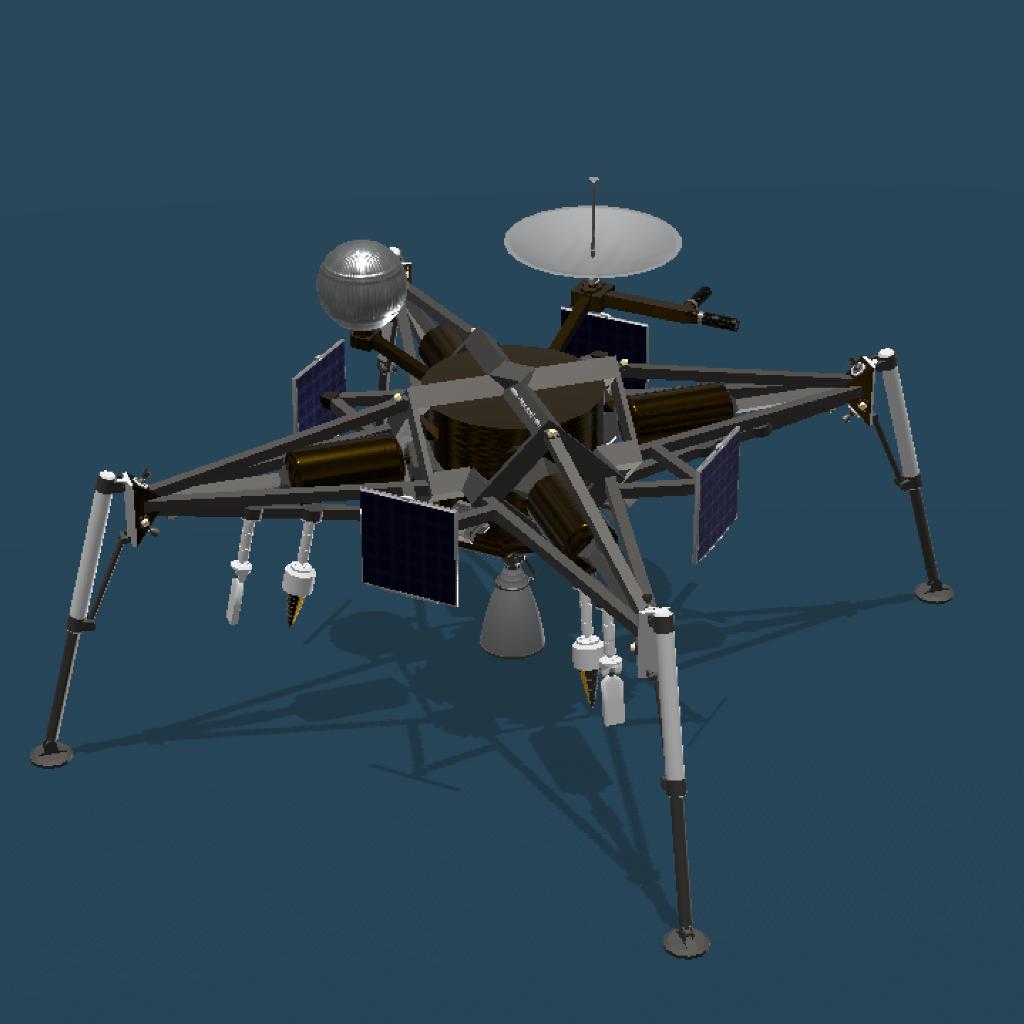
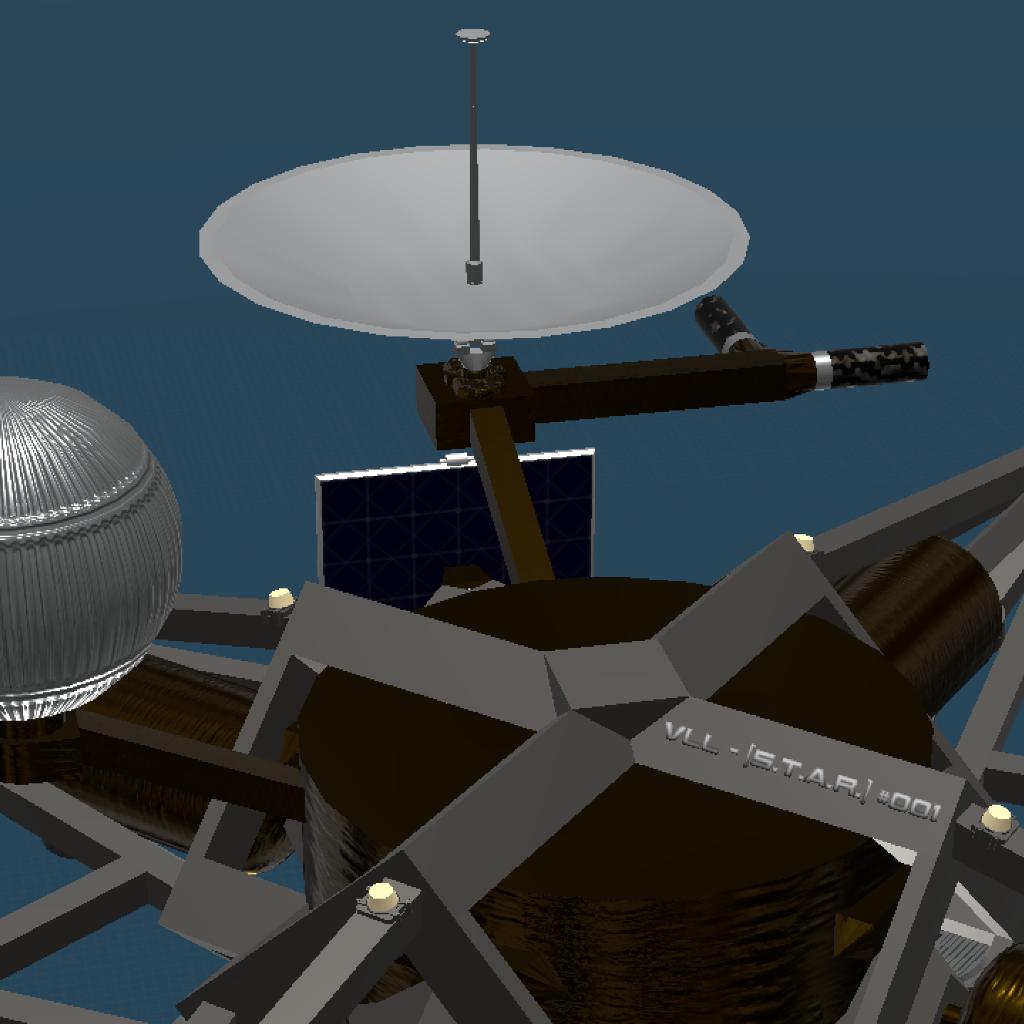

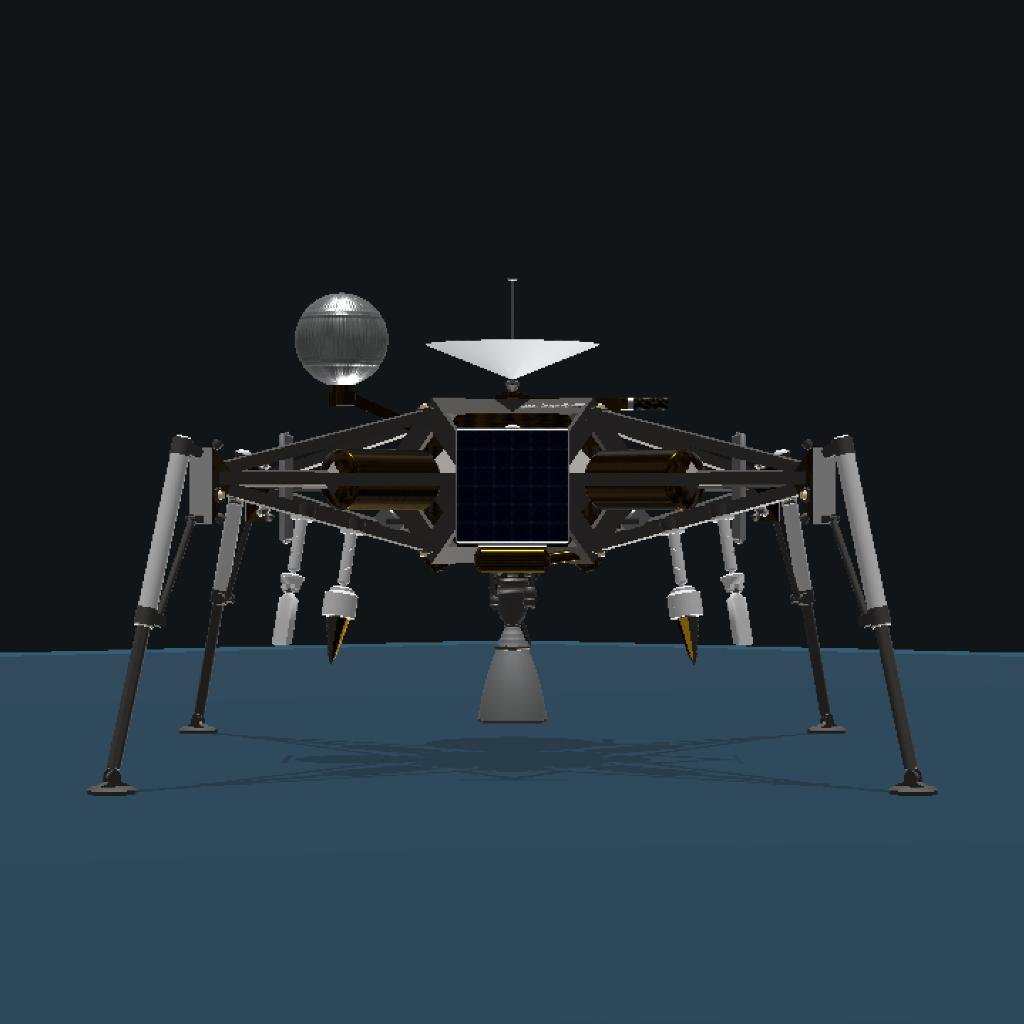
Vacuum Lunar Lander - [Surface Terrain Analyzing Resampler] #001
The mission of this lander is to drill into the surface of the target body and analyze the properties of the surface and relay the data back to Droo.
Requires 8m diameter or more fairing for the use of conventional rockets for deployment.
Capable of more than 1 TWR on all non-atmospheric satelites in the Juno System ensuring the capability to land safely.
Please avoid exceeding 8m/s of vertical velocity when touching down as the lander has a small clearance below the engine nozzle.
Sampling Operation:
Enable the Sample Collection
Slowly increase Slider 1 until the sample collector reaches the surface.
Enable the Right or the Left drill.
Slowly increase Slider 2 until the drill has made contact with the surface.
Once done drilling, slowly decrease Slider 2 and shortly after decrease Slider 1.
Lastly, disable the drill/s and close the sample collection.
High-Gain Antenna Controls:
Slider 3 for pitching.
Slider 4 for rotating.
How to attach to my rocket?
Ensure that the fairing has a diameter of 8 or more meters.
Select the command chip of the lander and rotate it upside down and the entire lander should also be upside down.
Create an adapter to the rocket and the lander. If you have a bus or some sort of a stage then you can also make an adapter for the lander.
Ensure that the lander is only connected on one point.
You should be ready for launch.
GENERAL INFO
- Created On: Android
- Game Version: 1.0.909.1
- Price: $2,088k
- Number of Parts: 284
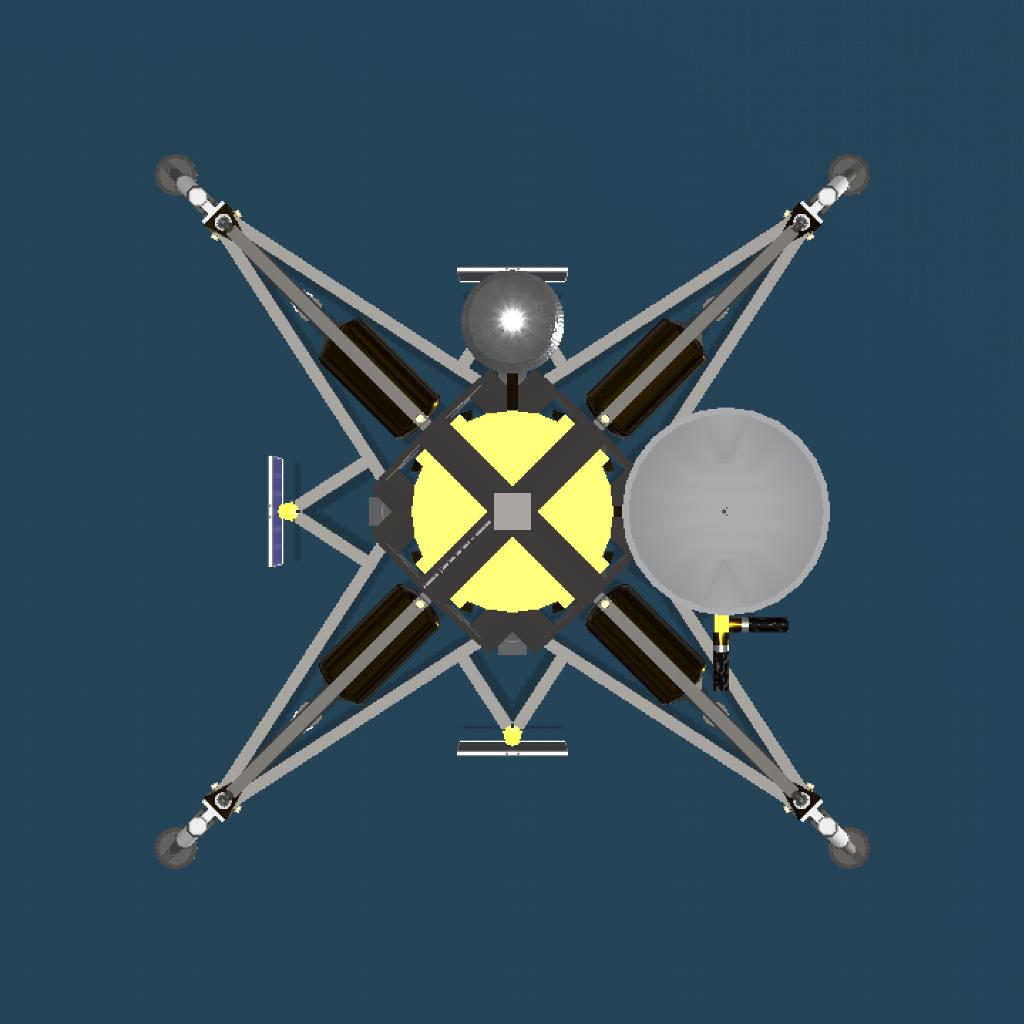
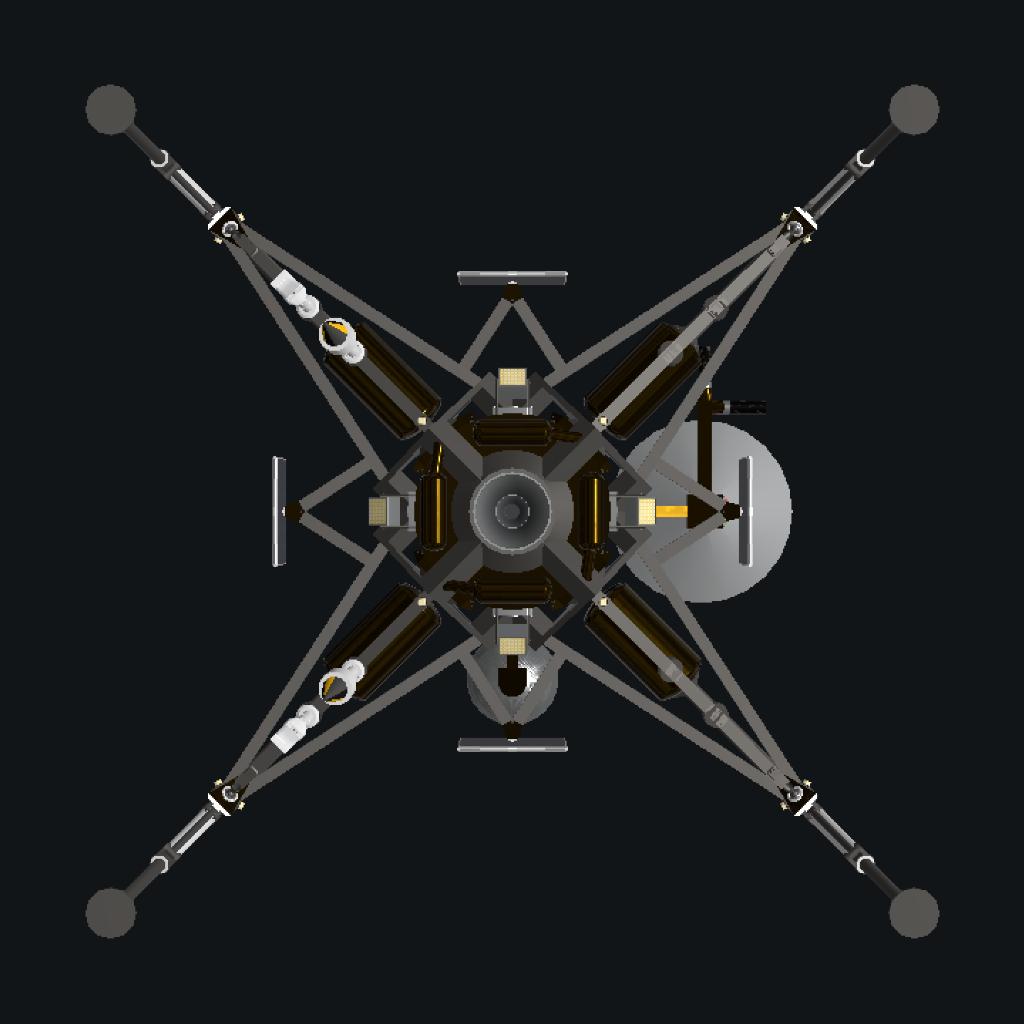
- Dimensions: 4 m x 5 m x 5 m
PERFORMANCE
- Total Delta V: 1.2km/s
- Total Thrust: 39kN
- Engines: 1
- Wet Mass: 5,669kg
- Dry Mass: 3,862kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|---|---|---|---|---|
| 1 | 1 | 1.2km/s | 39kN | 2.3m | 5,600kg |



7 Comments
- Log in to leave a comment
-
5,357 OverCAT831.8 years ago
@Tarian I'm sorry to disappoint you but the engine cycle of this lander is full flow stage fueled by kerolox.
-
-
-
-
-



Warning! : The lander has only around 1km/s of ∆v so I suggest adding another stage on top of the lander with sufficient ∆v to enable it to de-orbit the target body.