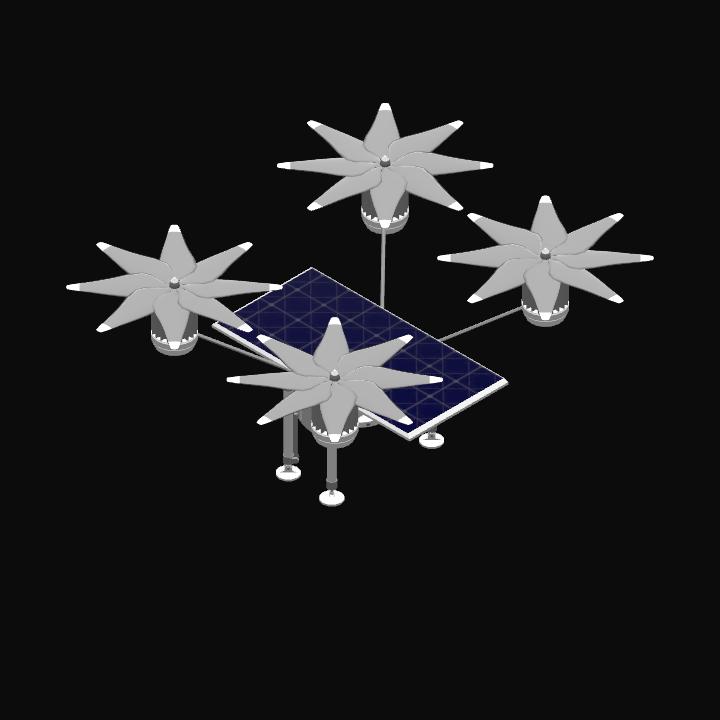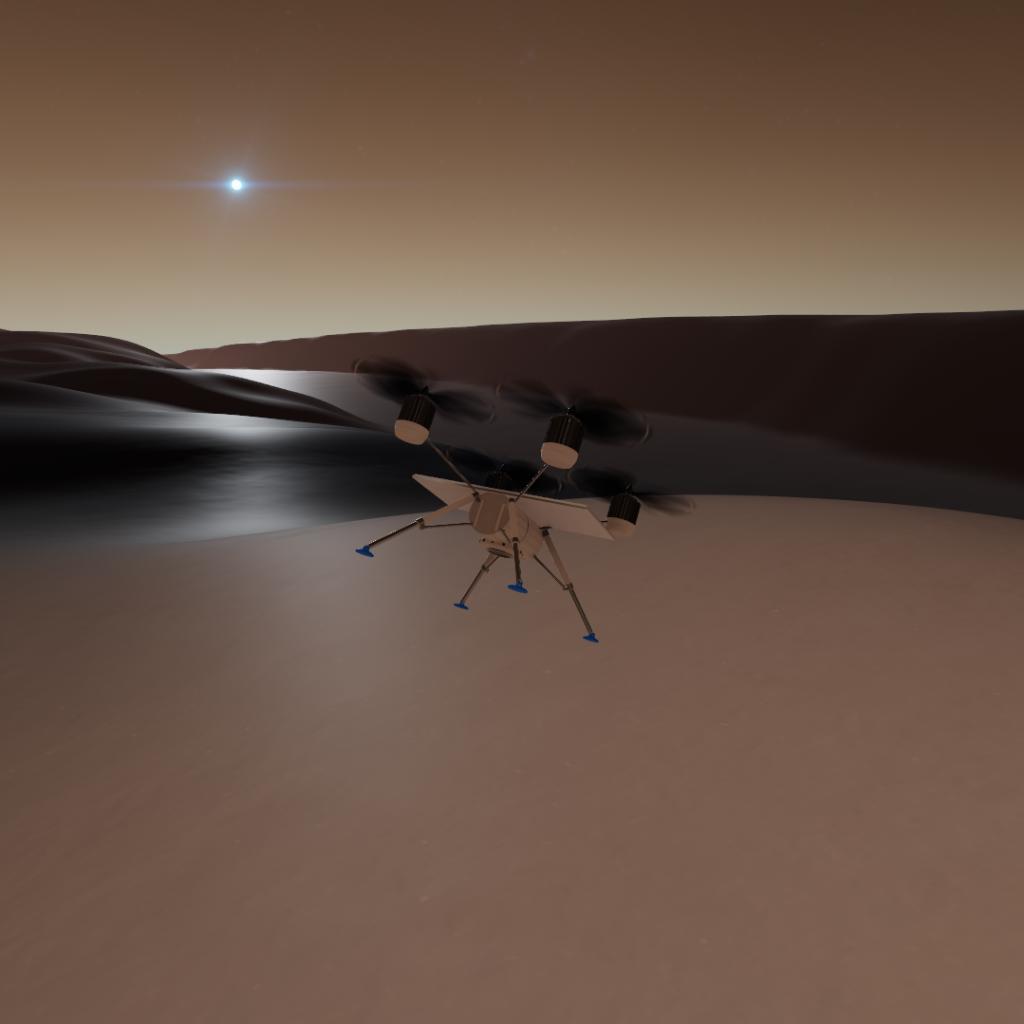
Based on my Mars Quadcopter, adapted to be fully vanilla and usable in the career. Tuned for comfortable flight on Cylero. It can maintain stable flight at ASL's up to 6km, but you need to be very careful at high ASL's as its thrust to weight ratio becomes very low there and so if you maneuver it too strongly, it might start uncontrollably losing altitude.
All controls are already implemented, including an autohover script and an autokill lateral script. Pitch and Roll are implemented via differential blade pitch, Yaw is implemented through differential throttle. Thrust modulation is implemented through alteration of blade pitch for quick response. Overall this is a quite nimble, maneuverable, and pleasant to fly quadcopter that works in the environment of Cylero.
It can take a while for the rotors to initially spin up so it can take off, please be patient.
AG5 = autokill lateral. Useful to stop where you want and make landings easier.
AG6 = locks up all rotors, resets all variables. Useful for transportation and resetting the controller in case something went wrong.
AG7 = autohover at desired altitude. It very gently and slowly climbs or descends to the target altitude, so entering a low value can be a relatively easy way to approach for a landing.
A docking port is included for ease of transportation on a rocket. WARNING: MAKE SURE TO SET ORIENTATION TO PLANE BEFORE CONNECTING IT TO YOUR ROCKET OR IT WON'T WORK CORRECTLY ONCE YOU LAND ON CYLERO.
The battery life is good for approximately 6 hours, during which you can travel over 1800 km, after which it needs a couple days to recharge. I also put a lot of effort into making it stable during 2x time warp to make it faster to get around. It has new code improvements that should make it more stable than any other of my quadcopters at 2x time warp. Higher than 2x seems to be impossible to fully stabilise, though.
NOT TESTED ON ANY OTHER PLANET
DO NOT USE WITH THE GAME'S HEADING LOCK (because the controller already implements PID control on its own, use the pitch/roll sliders instead if you want to make it fly hands-off)
GENERAL INFO
- Predecessor: Mars Quadcopter v1.3
- Created On: Windows
- Game Version: 1.2.210.0
- Price: $158k
- Number of Parts: 21
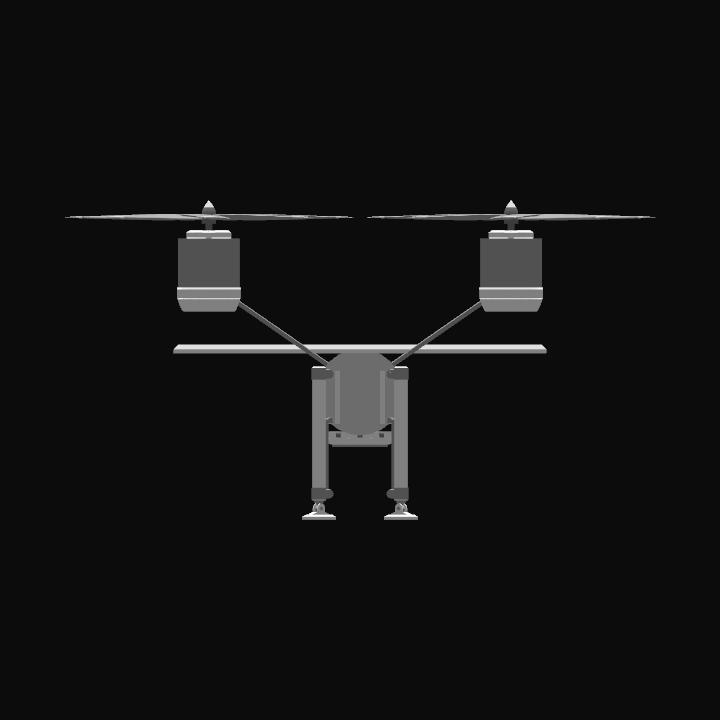
- Dimensions: 1 m x 1 m x 2 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 72kg
- Dry Mass: 72kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|